The attitude control subsystem (ACS) on-board the UoS3 uses a permanent magnet to align one of the satellite’s axes with Earth’s local magnetic field. Such a solution does not any consume any energy, which is a scarce resource on a cubesat. Especially when flying a power-hungry GNSS receiver. However, in order to fulfil our scientific mission objective (generating data to validate re-entry prediction), we need to know the orientation, or attitude, of UoS3. This is because the attitude will affect the drag that the satellite experiences, and thus also its re-entry profile, which we’re trying to reproduce.
One of the solutions to measure the attitude of the satellite is to measure the Earth’s magnetic field. By knowing the position where the field was measured, one can use a magnetic field model to understand how the magnetometer was oriented with respect the Earth at the time of the measurement, i.e. its attitude. In case you were wondering, this is exactly how your phone does it. We decided to use this approach to attitude sensing as well, because it is reliable and does not require bulky sensors to be placed on the outermost surfaces of the satellite (we’ll cover as much of the external area with solar cells to produce enough power to keep the GNSS receiver running). Measuring the magnetic field next to a magnet is not the simplest of tasks, and thus we were testing our magnetometer in a Helmholtz cage to make sure we can do it accurately enough to get accurate enough attitude estimates. First of all, we tested just the magnetometer to understand its performance:
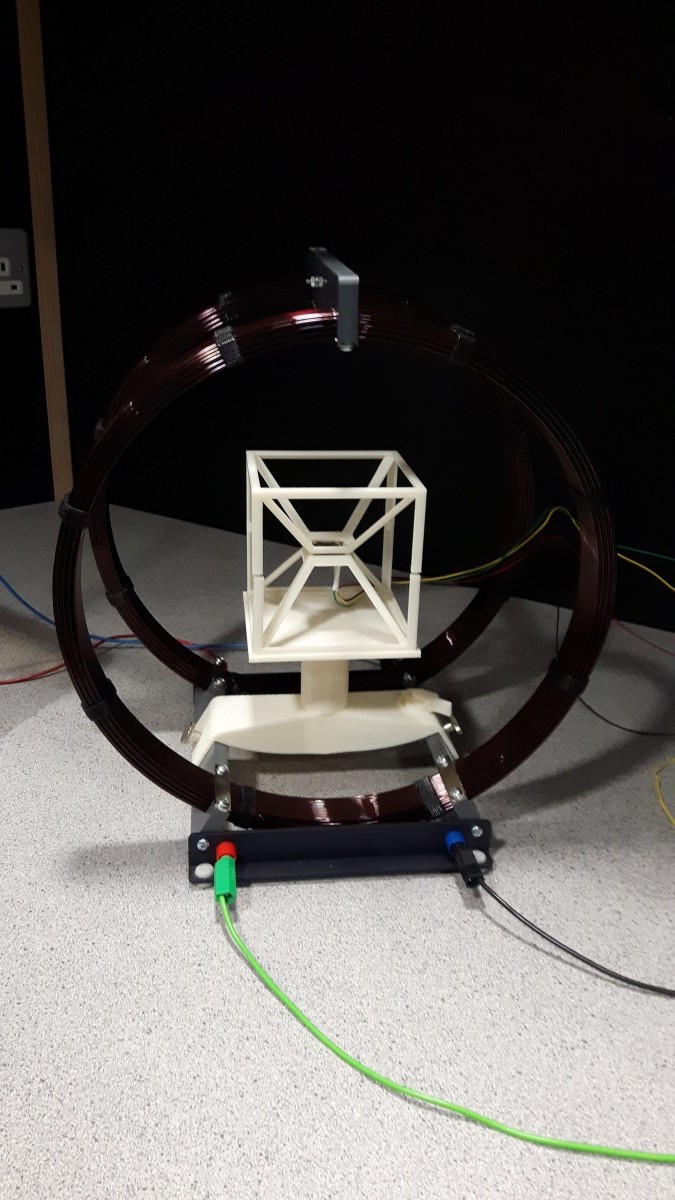
Test arrangement that we use to test if the magnetometer we’re using will be able to measure Earth’s magnetic field with sufficient accuracy to meet our attitude determination accuracy requirements.
Now we’ve moved to testing the magnetometer and the magnet in the flight configuraton:
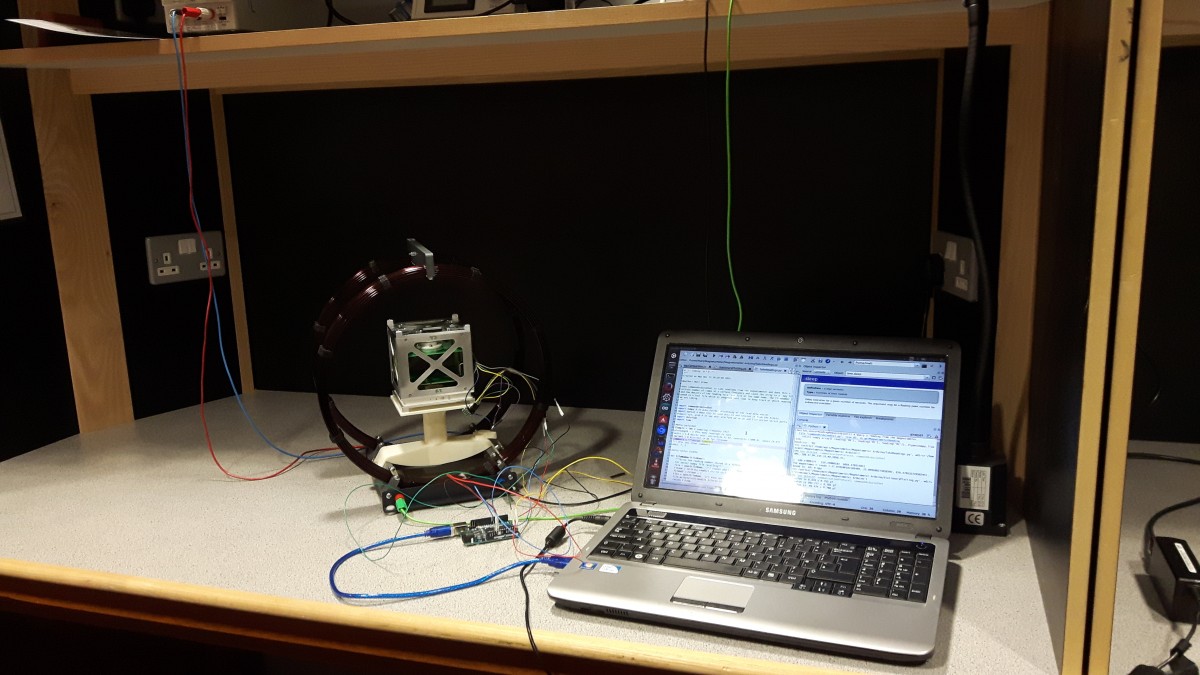
Engineering model of the UoS3 in the Helmholtz cage.
Some of the internal components of UoS3 are still in post, so we cannot do a full calibration yet. However, this is an important step that will tell us how good our data will be and how much we can help the scientific community in improving the accuracy of re-entry prediction.
No comments yet.