The tool is known as the Freight Optimisation with RiSk, Energy and mixed-mode Transport Integration (FORSETI), and can be used tactically (i.e., short notice, planning for a near future demand), or strategically (i.e., long-term planning, using historic data). The logistics transport modes available in FORSETI are vans (diesel or electric), bicycle couriers, and drones. Rather than assuming straight-line routings for drones, the tool incorporates more realistic flightpaths that account for ground risk (i.e., the risk of a fatality to a third party on the ground due to a drone crash) by detouring away from areas with higher population densities. FORSETI was developed principally in relation to the transport within the NHS of pathology specimens taken from patients at community clinics to centralised pathology laboratories (typically located at large hospitals) for analysis. However, findings from its use in this setting may also be highly relevant for logistics operations in other settings. Furthermore, the underlying framework of the tool could be applied to other logistics operations through adaptation of the software.
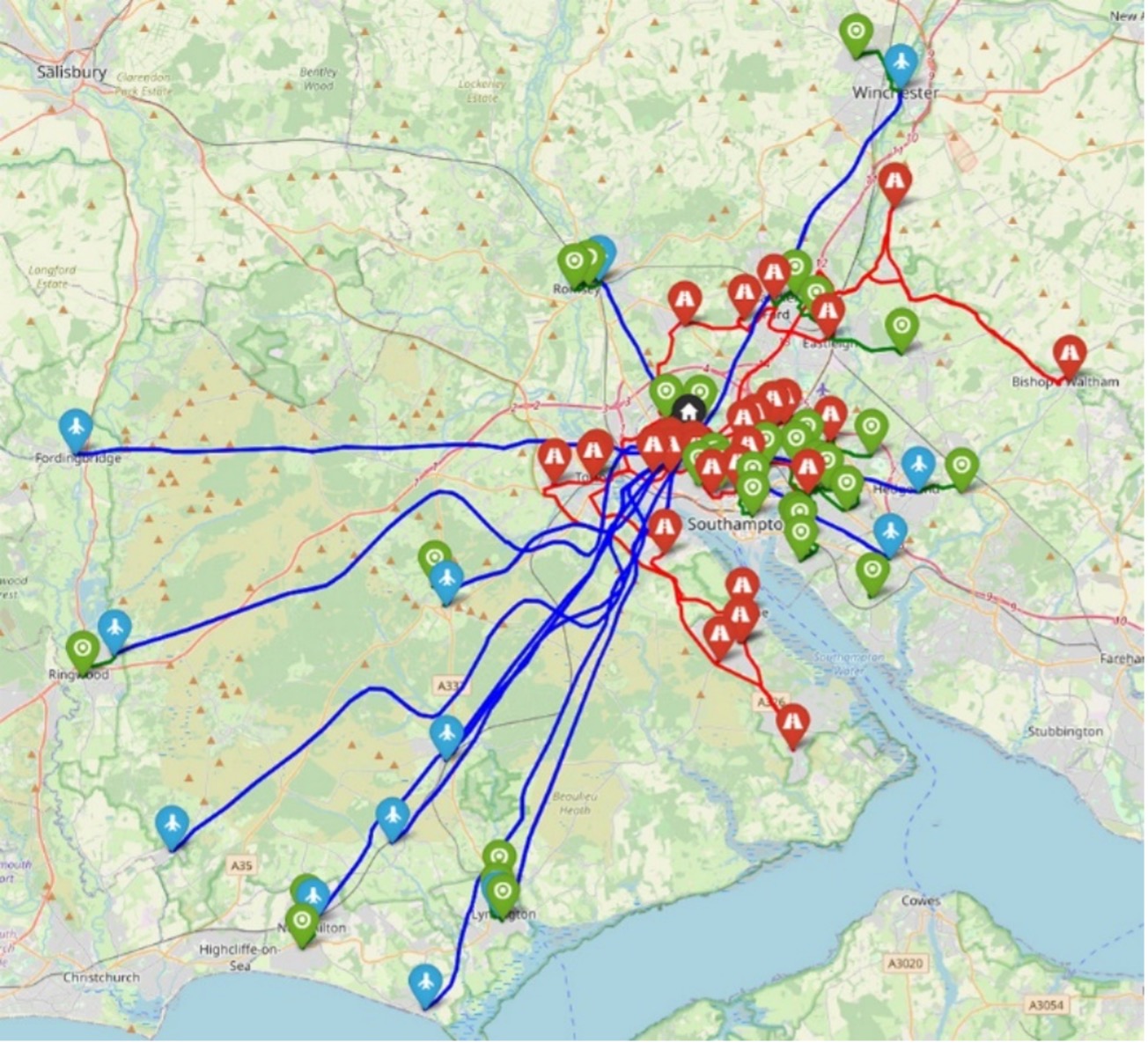
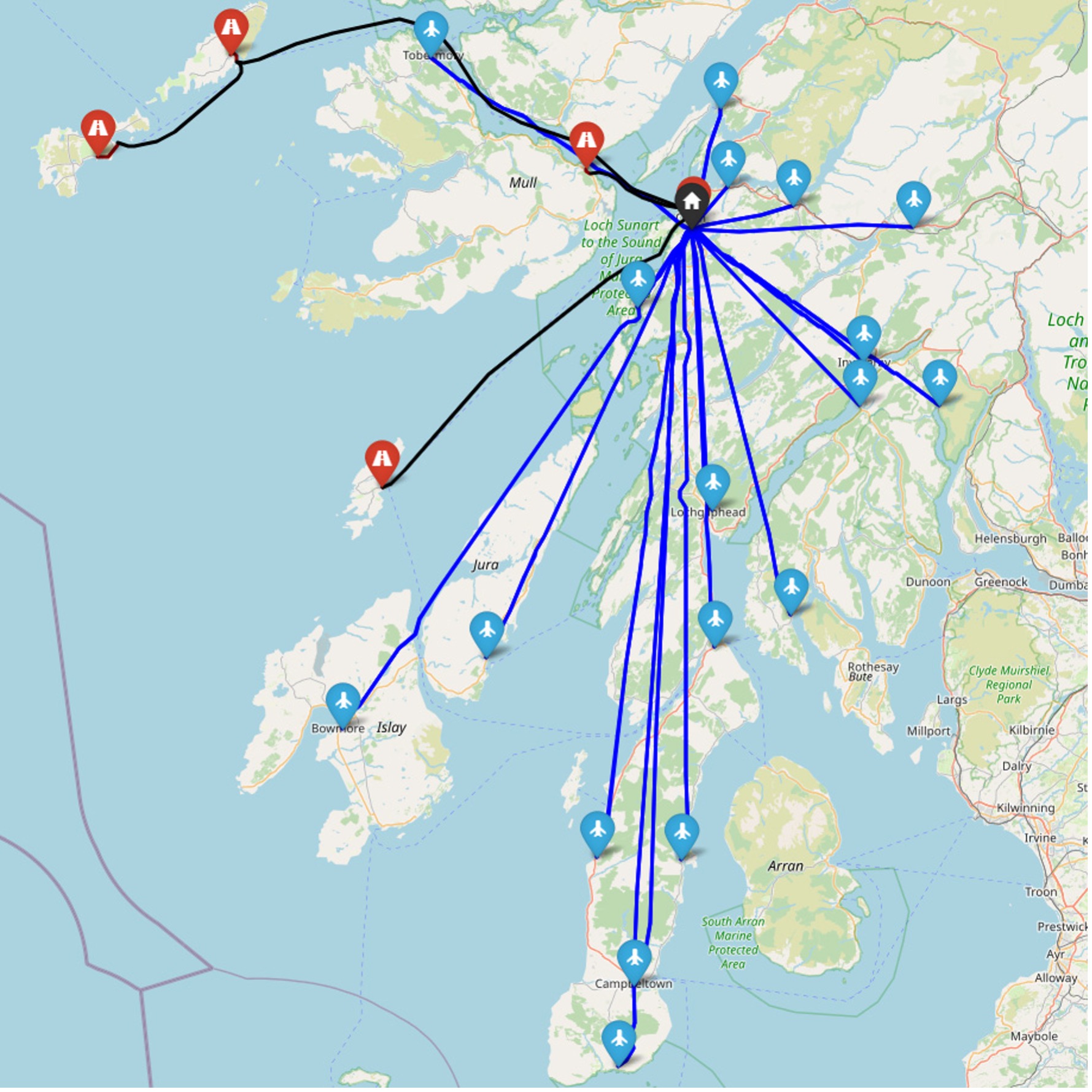
FORSETI was used to quantify the effects on costs, transit times, energy consumption and emissions of integrating drones in mixed-mode logistics systems for the transport of routine patient diagnostic specimens in case study regions of the UK. Key findings suggested that drones needed to be much less expensive than current costs to be selected in mixed-mode logistics systems as an alternative to more traditional modes (e.g., vans, bicycle couriers), and that reductions in transit times, energy consumption, and emissions were possible but at considerable increases in costs, calling in to question the true value of achieving these reductions. For example, application of FORSETI to a case study of the Southampton region on the South coast of the UK found that drone cost reductions of 82% were required before drones began to be selected for use. Moreover, results suggested that reductions in maximum transit time (i.e., the time from initial collection at a community clinic to final delivery at the hospital pathology laboratory) of 84% were possible compared to a van-only system but at 133% increase in costs, and that reductions in energy/emissions of 23% were possible compared to an electric van-only approach but at 65% increase in costs, although most energy/emissions savings were due to the introduction of bicycle couriers, with drones tending to offer energy/emissions savings only when serving more remote and isolated locations (i.e., community clinics a long distance from the pathology laboratory with no/few other clinics nearby).
FORSETI was also used to establish generalisable results regarding whether (or not) drones are likely to be a viable option for a given logistics network based on quantification of certain network characteristics (network size, centrality of pathology laboratory, clustering of community clinics). The aim of this research was to provide practitioners and policy makers with an initial screening tool (i.e., rule of thumb) with which to assess networks where drones are under consideration. Only if drones appeared to be viable, would a full analysis with FORSETI then be conducted to generate an optimal solution.

Blakesley A (2023) Air Energy and Risk Trajectory Optimisation, Southampton, UK: University of Southampton.
Air energy and risk trajectory optimisation
Blakesley A, Anvari B, Kroll J and Bell M G H. Minimum energy route optimisation of a quad-copter UAV with landing incentivisation. 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 8-12 October 2022, Macau, China. Institute of Electrical and Electronics Engineers (IEEE), 2300-2306.
https://doi.org/10.1109/ITSC55140.2022.9922101
Grote M, Oakey A, Pilko A, Krol J, Blakesley A, Cherrett T, Scanlan J, Anvari B and Martinez-Sykora A (2024) ‘The effects of costs on drone uptake in multi-modal logistics systems within a healthcare setting’, Transport Economics and Management, 2, 58-75.
https://doi.org/10.1016/j.team.2024.03.001
Grote M, Oakey A, Pilko A, Krol J, Blakesley A, Cherrett T, Scanlan J, Anvari B and Martinez-Sykora A. The Scope for Integrating Uncrewed Aerial Vehicles into Healthcare Logistics Systems – A Case Study of Pathology Specimen Transport. Transportation Research Board (TRB) 104th Annual Meeting, 5-9 January 2025, Washington D.C., USA. Transportation Research Board.
Scope for Integrating UAVs into Healthcare Logistics
Grote M, Oakey A, Pilko A, Krol J, Blakesley A, Cherrett T, Scanlan J, Anvari B and Martinez-Sykora A (2025) ‘Investigating the emissions effect of integrating drones into mixed-mode logistics – A case study of a healthcare setting’, International Journal of Sustainable Transportation, 1–20.
https://doi.org/10.1080/15568318.2025.2564851
Krol J (2023) Land Logistics, Southampton, UK: University of Southampton.
Krol J, Anvari B, Blakesley A and Cherrett T. Estimation of Energy Usage in Electric and Diesel Vans for Logistics Applications Using Gaussian Processes. Transportation Research Board (TRB) 102nd Annual Meeting, 8-12 January 2023, Washington D.C., USA. Transportation Research Board.
Energy Usage in Electric and Diesel Vans for Logistics Applications
Oakey A. (2023). Investigating the scope for integrating uncrewed aerial vehicles (UAVs) into mixed-mode fleets to support national health service (NHS) logistics operations. Thesis submitted for Doctor of Philosophy, University of Southampton.
https://eprints.soton.ac.uk/483801/
Oakey A (2023) Land-Air Logistics Optimisation, Southampton, UK: University of Southampton.
Land-air logistics optimisation
Oakey A, Grote M, Pilko A, Blakesley A and Krol J (2024) FORSETI Overview – Guidance document explaining the underlying mathematical models for the FORSETI integrated logistics tool, Southampton, UK: University of Southampton.
Oakey A, Grote M, Pilko A, Krol J, Blakesley A, Cherrett T, Martinez-Sykora A and Anvari B (2025) ‘Comparative modelling of drone interventions with traditional logistics modes for expedited and equitable deliveries’, NPJ Sustainable Mobility and Transport, 2.
https://doi.org/10.1038/s44333-025-00050-8
Oakey A, Grote M, Smith A, Cherrett T, Pilko A, Dickinson J and Ait Bihi Ouali L (2022) ‘Integrating drones into NHS patient diagnostic logistics systems: Flight or fantasy?’, PLoS One, 17(12), e0264669.
https://doi.org/10.1371/journal.pone.0264669
Oakey A, Martinez-Sykora A and Cherrett T (2023) ‘Improving the efficiency of patient diagnostic specimen collection with the aid of a multi-modal routing algorithm’, Computers & Operations Research, 157.
https://doi.org/10.1016/j.cor.2023.106265
Oakey A, Martinez-Sykora A and Cherrett T (2024) ‘An Adapted Savings Algorithm for Planning Heterogeneous Logistics with Uncrewed Aerial Vehicles’, Multimodal Transportation, 3(4), 100170.
https://doi.org/10.1016/j.multra.2024.100170
Pilko A (2023) UAS Ground Risk Model Summary, Southampton, UK: University of Southampton.
Pilko A, Sóbester A, Scanlan J and Ferraro M. Spatiotemporal Ground Risk Mapping for Uncrewed Aerial Systems Operations. AIAA SCITECH 2022 Forum, 3-7 January 2022, San Diego, USA. American Institute of Aeronautics and Astronautics.
https://doi.org/10.2514/6.2022-1915
Pilko A, Sóbester A, Scanlan J P and Ferraro M (2023) ‘Spatiotemporal Ground Risk Mapping for Uncrewed Aircraft Systems Operations’, Journal of Aerospace Information Systems, 20(3), 126-139.
https://doi.org/10.2514/1.I011113
Pilko A and Tait Z (2022) ‘SEEDPOD Ground Risk: A Python application and library for Uncrewed Aerial Systems ground risk analysis and risk-aware path finding’, Journal of Open Source Software, 7(71).