However, risk minimisation considerations may necessitate detours, thereby eroding this time advantage and potentially requiring intermediate stops for refuelling/charging or battery swaps, further increasing overall transit times. The integration of drones into logistics operations inherently introduces risks. In contrast to established transport modes (e.g., vans, bicycle couriers), commonly agreed design and manufacturing standards for drones are currently lacking, and the typical Operational Authorization (OA) process requires a resource-intensive, case-specific review of the drone operator’s safety case by the relevant National Aviation Authority (NAA).
While the case-specific OA process is generally effective in identifying most safety deficiencies, it is not without limitations, particularly with regards to scalability. Also, it is important to acknowledge that no process can eliminate entirely the risk of a drone malfunction leading to a loss of controlled flight. Therefore, the implementation of complementary risk minimisation strategies should be considered to counter Third Party Risks (TPR), both on the ground and in the air. Operational risk management, focusing on drone flight procedures to minimise TPR exposure, represents one such strategy, which can be conveniently divided into the two key areas (i.e., ground risk and air risk) for analysis.
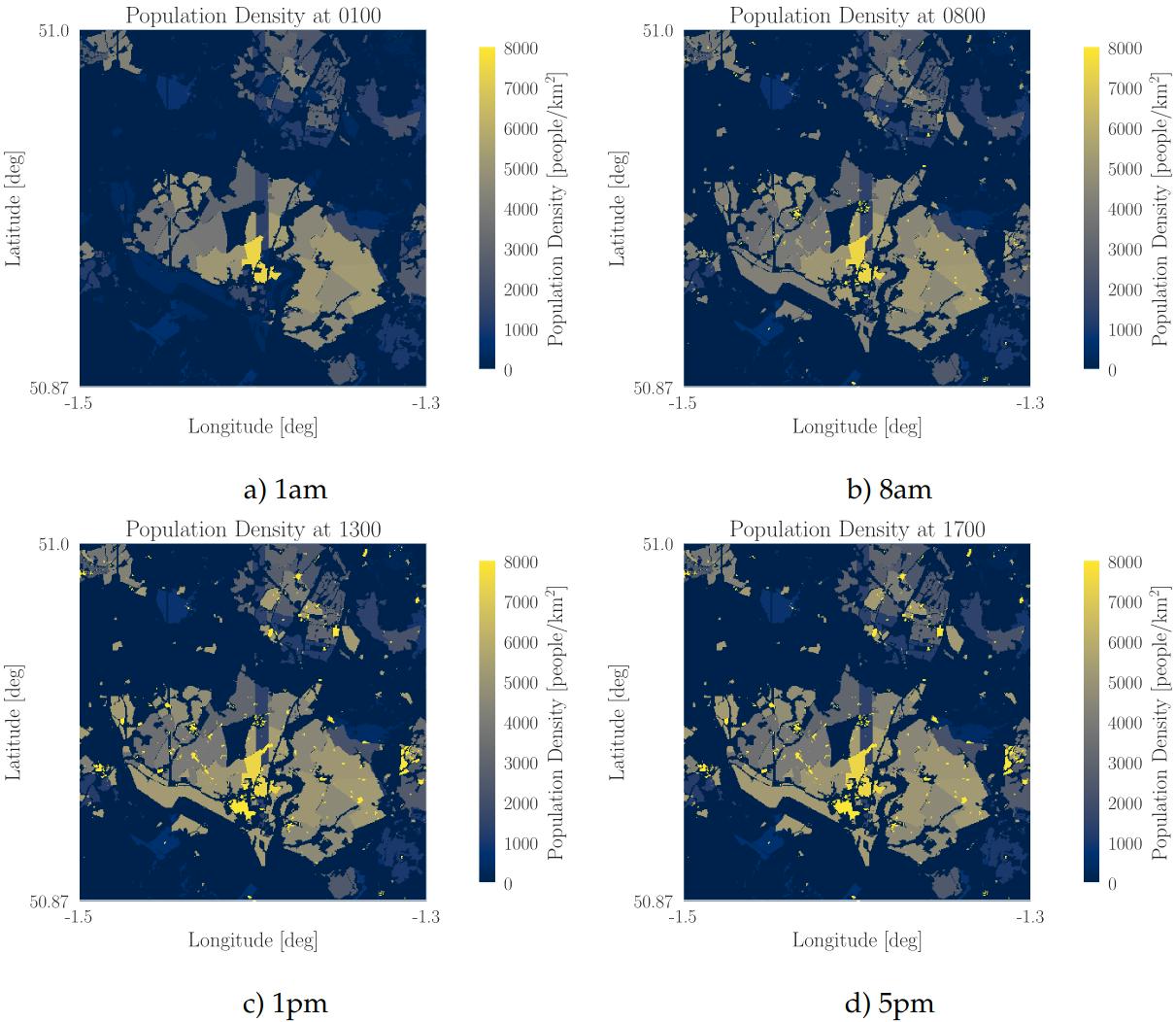
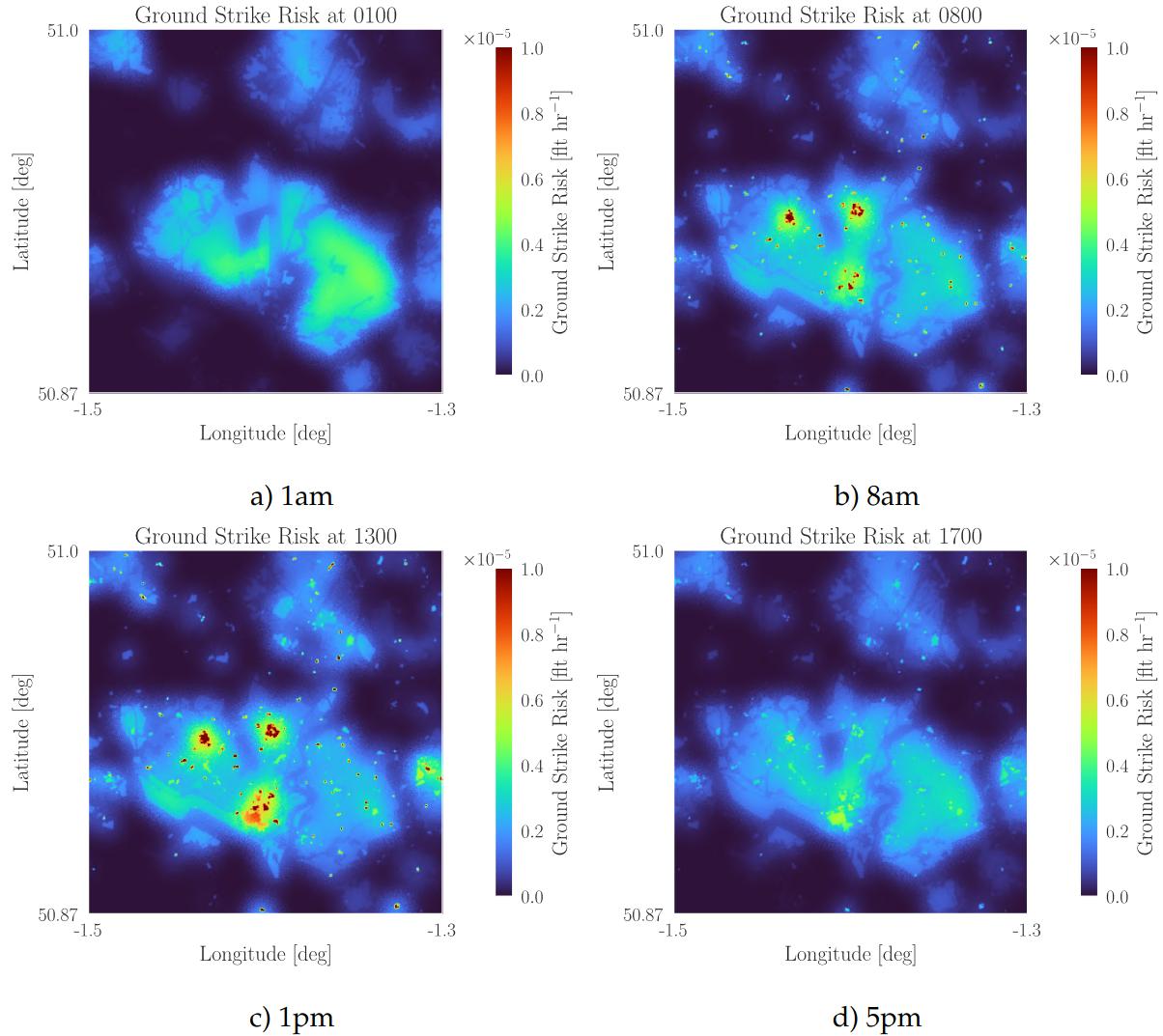
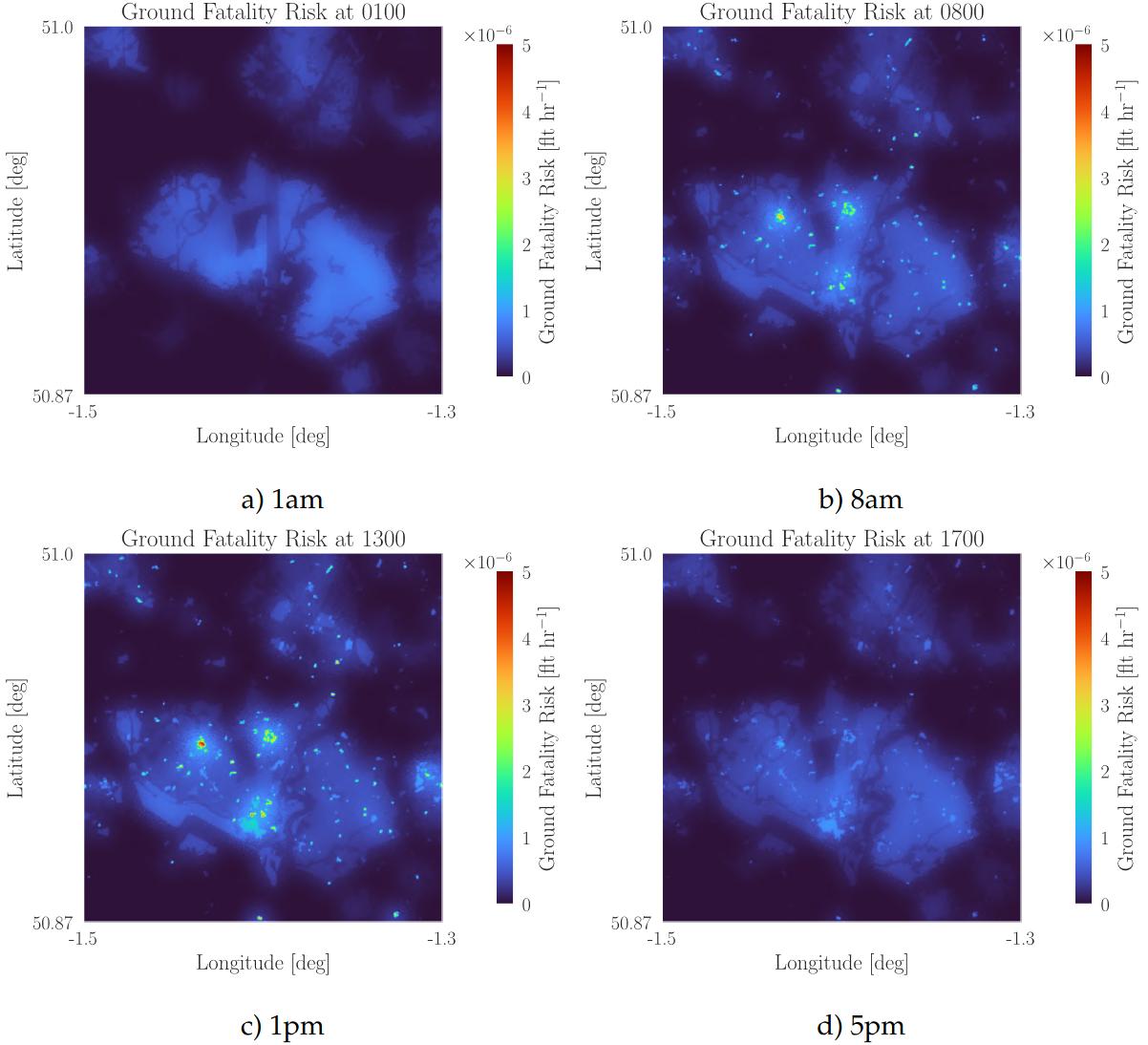
Analysing ground risk depends on the ability to model and quantify potential adverse events (i.e., estimating the probability of a drone malfunction causing a fatality on the ground). This analysis, which is theoretically and computationally complex, usually involves the development of specialised software models. The E-Drone project has developed one such model, which generates a geospatial grid depicting the probability of a drone causing a fatality at any given point on the ground, allowing for flight paths to be adjusted to minimise TPR exposure by rerouting around high-risk areas. This model also incorporates temporal variations to account for fluctuations in population density throughout the day.
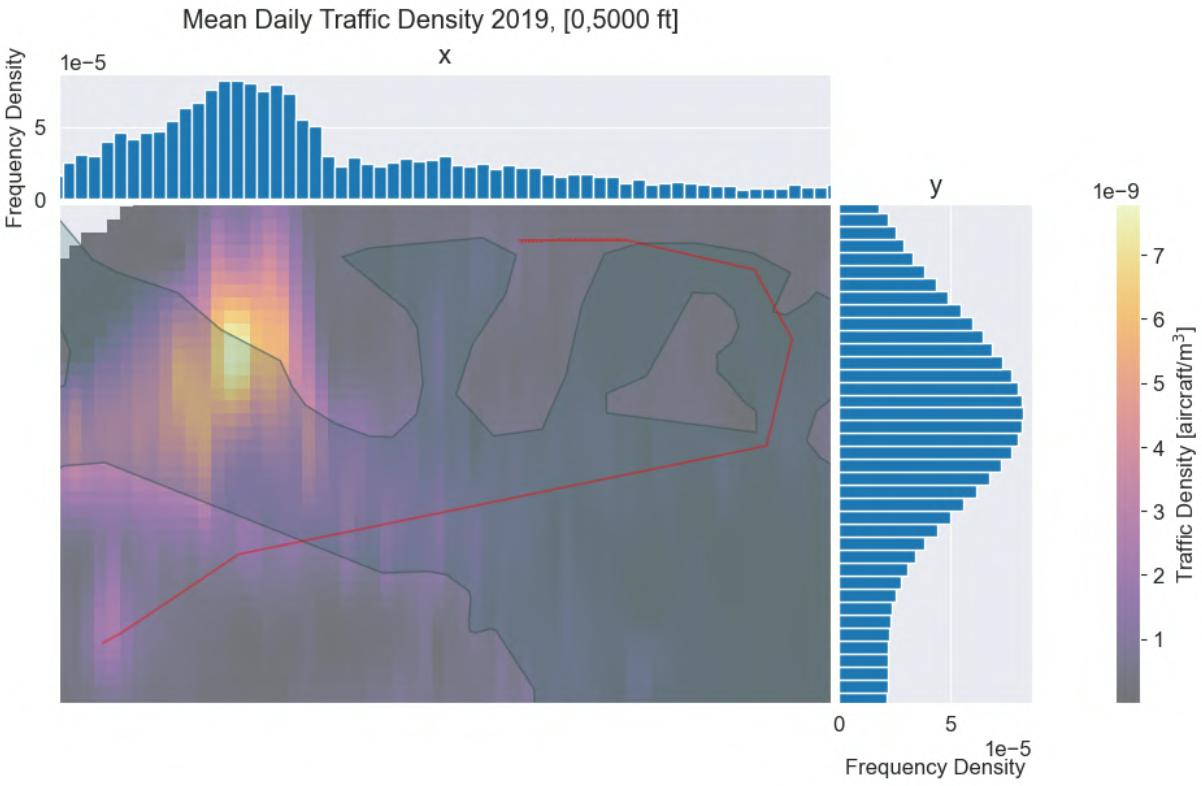
Analysing air risk presents a greater challenge due to the dynamic nature of the airspace environment, requiring avoidance of collisions with (or infringements of the protected airspace closely surrounding) other moving aircraft. Segregated Airspace Volumes are the typical method currently employed to safeguard BVLOS drone operations by excluding all other aircraft from the airspace volume in which operations are taking place. However, the future vision of integrating drones with crewed aircraft within shared airspace (i.e., the UTM concept) necessitates a more sophisticated approach to mitigating air risk. Simulation-based modelling of novel shared airspace structures has suggested that a layered approach, where flight altitude is determined by flight direction, could represent a promising solution. Alternatively, data-driven methods (e.g., using aircraft transponder data to assess traffic density) have also been explored. To mitigate air risk and facilitate the implementation of shared airspace, the E-Drone project has developed a 4D airspace booking system that strategically deconflicts planned trajectories in a discretised model of the airspace, where conflicts are dealt with via a simple first-come-first-served principle, with all traffic assumed to be of equal importance. This booking system was trialled at the Llanbedr testing ground in North Wales (see Drones in Shared Airspace).
Oakey A, Pilko A, Cherrett T and Scanlan J (2022) ‘Are Drones Safer Than Vans?: A Comparison of Routing Risk in Logistics’, Future Transportation, 2(4), 923-938.
https://doi.org/10.3390/futuretransp2040051
Pilko A, Ferraro M and Scanlan J (2023) ‘Quantifying Specific Operation Airborne Collision Risk through Monte Carlo Simulation’, Aerospace, 10(7).
https://doi.org/10.3390/aerospace10070593
Pilko A, Oakey A, Ferraro M and Scanlan J. The Price of a Safe Flight: Risk Cost Based Path Planning. 2024 IEEE International Conference on Robotics and Automation (ICRA), 13-17 May 2024, Yokohama, Japan. Institute of Electrical and Electronics Engineers (IEEE), 3884-3890.
https://doi.org/10.1109/ICRA57147.2024.10610752
Pilko A, Sóbester A, Scanlan J and Ferraro M. Spatiotemporal Ground Risk Mapping for Uncrewed Aerial Systems Operations. AIAA SCITECH 2022 Forum, 3-7 January 2022, San Diego, USA. American Institute of Aeronautics and Astronautics.
https://doi.org/10.2514/6.2022-1915
Pilko A, Sóbester A, Scanlan J P and Ferraro M (2023) ‘Spatiotemporal Ground Risk Mapping for Uncrewed Aircraft Systems Operations’, Journal of Aerospace Information Systems, 20(3), 126-139.
https://doi.org/10.2514/1.I011113
Pilko A and Tait Z (2022) ‘SEEDPOD Ground Risk: A Python application and library for Uncrewed Aerial Systems ground risk analysis and risk-aware path finding’, Journal of Open Source Software, 7(71).