
Fluid Structure Interactions, alongside other parts of the University of Southampton, attended RiverFest 2017, part of Southampton Sailing Week on Saturday the 27th May. The event was held in Riverside Park, alongside the Itchen River, with rain in the morning and lovely sunshine in the afternoon and evening.
It was designed as a day of music, theatre, science, games, crafts, talks & workshops. Bringing together artists, historians and scientists to share their knowledge of the river with us. The aim is to inspire the community to enjoy and protect the Itchen river into the future.
Estimates of over 4000 people attended the event across the whole riverside site. FSI brought their Science of Ships display to demonstrate, hands-on, why ships float, sink and capsize.



Category Archives: Uncategorized
Long service on board ship science…
A recent innovation at the University of Southampton has been the introduction of a recognition award for long service at 20 years (a glass bowl) and 30 years (a carriage clock). Six members of staff in Fluid Structure Interactions were eligible. Presentations were made by our Head of Academic Unit, Prof Penny Temarel. (Top left) to Prof Ajit Shenoi for 30+ years, (Top middle) by Prof Shenoi to Prof Temarel for 20+ years, (Top Right)PT to Dr Mingyi Tan for 20+ years, (Bottom Left) PT to Prof Dominic Hudson for 20+ years, (Bottom Middle) PT to Prof Stephen Turnock for 20+ years and (Bottom Right) PT to Prof Philip Wilson for 30++ years!

SHIP SCIENTISTS VISIT WALLENIUS WILHELMSEN CAR CARRIER, TOLEDO
Second year students Miri Park and Moriba Konate report:

The second year ship science students had the privilege of visiting the car carrier, Toledo at the Southampton dock. The Japanese built 200m ship had 12 tiers of car decks with the total capacity of 6564 units of passenger cars.
Before going on board, the students spoke to the engineers from Ecosubsea, a company which uses remotely controlled mini-submarines to clean underwater hull. The engineers highlighted the importance of protecting the hull from fouling and how a clean hull with minimal paint damage helps to reduce air pollution and fuel costs for a ship. This allowed the students to acknowledge the growing environmental issues and the needs for regulations on ships.

On the bridge, the electronic chart display and information system (ECDIS) was shown by the chief engineer, which helps the navigation crew to monitor the ship and plan the route in advance. However, in contrast to this technological advancement, a signalling lamp was still in use and it was explained that all crew must know the Morse code. The ballast control system was shown and the students watched how it automatically ballast and deballast during the loading process.
The students were taken around the accommodation space, including the galley, mess rooms, offices and gym, which helped to get an idea for their general arrangement assignment and to see why it is important to provide recreational spaces and a habitable environment for the crew as a naval architect.

Overall, the visit was a success and the shaft tunnel and the steering gear system was most memorable for the students. This helped to understand the importance of shaft alignment and its maintenance during service and it further reinforced their understanding of lecture materials. We are all very thankful to Wallenius Wilhelmsen for this opportunity and hope to see you again!
Brightest and best: – opportunities available
 Fluid structure interactions is looking for able individuals with a background in engineering, maths or physics who wish to deepen their research skills by carrying out PhD research. Our group of 40+ PhD students is a vibrant community although focussed in maritime engineering applications but with many links to other research groups both within Southampton and internationally.
Fluid structure interactions is looking for able individuals with a background in engineering, maths or physics who wish to deepen their research skills by carrying out PhD research. Our group of 40+ PhD students is a vibrant community although focussed in maritime engineering applications but with many links to other research groups both within Southampton and internationally.
A number of immediate opportunities are listed below but it is always worth contacting any of our members of staff directly to see what other opportunities they might have. The applications process itself can be accessed via the on-line link.
The following projects are currently on offer covering some of our diversity associated with the hydrodynamics of swimming and the musco-skeletal system, reducing the climate change impact of international shipping, exploring the challenges of autonomous surface vessels for environmental monitoring, finding new approaches for maritime design optimisation.
Assessing the impact of hydrodynamic loads on shoulder joint injuries in swimming, contact Dr Joe Banks
A High Temporal Resolution Study of Sediment Deposition At River Mouths Using Persistently Present Autonomous Surface Vehicles contact Dr Jon Downes
Reducing shipping emissions through accurately quantifying ship powering performance using statistical analysis of operational data contact Professor Dominic Hudson
Modelling ship selection and operational usage decisions under uncertainty – towards a better understanding of GHG emissions in international shipping contact Professor Dominic Hudson
Assessment of ship powering performance using machine learning techniques contact Professor Dominic Hudson
Re-imagining the genetic algorithm with application to marine engineering design contact Dr Adam Sobey
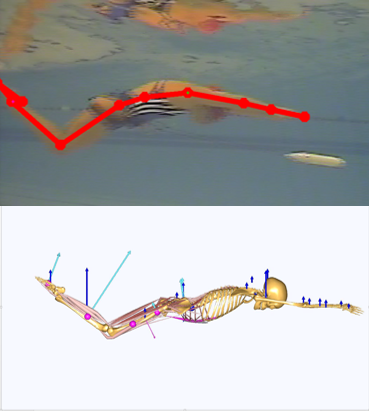
GDP 19: Atlantis Deep Sea Research Platform
Only 5% of the world’s ocean floor have been mapped, collecting data at these depths provides a significant challenge. This project aims to design a deep-sea research platform, in the form of an Autonomous Underwater Vehicle.
If you want to find out more about the project, please visit our Facebook page: https://www.facebook.com/AtlantisUnderwaterRobot/ The robot will do the following;
- Travel to depths of 100m.
- Carry a payload of sensors and cameras that can collect images and data.
- Uses a flapping foil mechanism for propulsion.The robot will be bioinspired with oscillating foil propulsion; this will provide increased manoeuvrability.
This project involves designing, building and testing a full-scale robot. The team will carry out the following tasks to complete the project:
- Developing the conceptual design
- Modelling and optimising an interacting flapping foil mechanism
- Carrying out material testing for the hull and foil materials to determine if they can withstand operating conditions at 100m depth
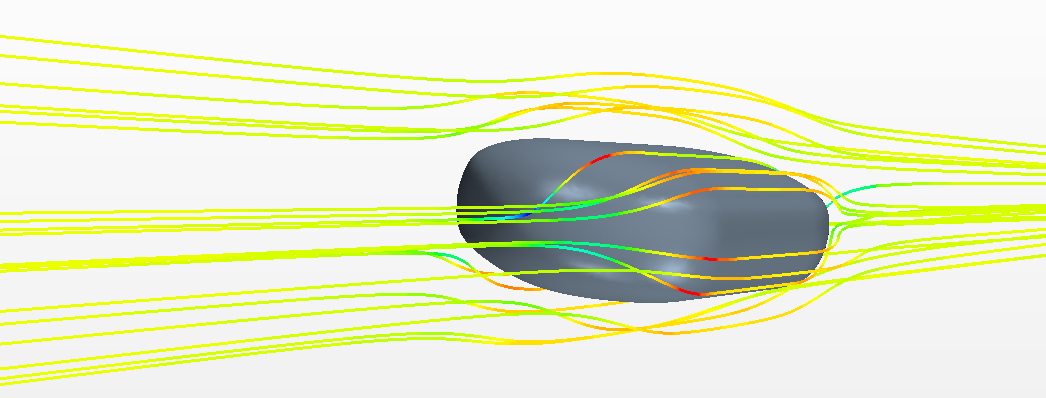
- Modelling the hull under operating conditions using FEA, and reinforce the structure where necessary
- Manufacturing and testing the separate elements of the AUV
- Programming the AUV so it is capable of operating autonomously underwater, navigating a pre-set path.
- Test the robot at a depth of 3m
Promoting Maritime Engineering at the IMechE Arnold Barks Christmas Lecture
Professor Stephen Turnock and Laura Marimon Giovannetti had a busy day on the 7th July talking about the University of Southampton’s experience in engineering excellence in performance sport. Firstly in the afternoon at an event hosted by the Bishop Wordsworth school in Salisbury to an audience of 230 year 10 to year 12 students from four different school’s in the Salisbury area. Then again in a slightly longer format to the IMechE’s Wessex Region as the 11th Annual Arnold Barks Christmas Lecture to an audience of over 100 .

The talk linked the long standing work at Southampton in performance sailing led for nearly five decades by the internationally renowned Wolfson Unit for Marine Technology and Industrial Aerodynamics now based in B185 adjacent to our new 138 m long towing tank, the work on developing F1 and Indy cars in the R.J.Mitchell wind tunnel from the late 70s as well as over a decade of collaboration with UKSport/EIS(R&I) supporting a wide range of sports. The pursuit of performance that ensure that all athletes have the best possible equipment relies on a deep understanding of the physics of the problem coupled to possible engineering solutions. A common thread was the human aspects of the work where able PhD students work alongside sport scientists, coaches and athletes. To date PSEL has graduated 8 EngD/PhD students many of whom have an undergraduate Ship Science degree.

In a final section the relevance of the techniques and technologies developed in performance sport to the wider world and in particular the necessity to find solutions to the essential challenge of improving the energy efficiency of global shipping which transports 90% of the worlds goods, emits 3% of CO2 in 100,000 ships. How will these ships be fuelled in a low carbon world? An example of the cross-over is in Dr Angus Webb whose spin out company Dynamon offers services to the logistics industry.
For both talks the audience asked challenging questions and were in turn asked to spread the word that many more maritime engineering and ship scientists are needed!
Royal Visit to Towing Tank and FSI Labs
As part of a recent visit to the University of Southampton the Duke of Kent and guests toured our maritime robotics and performance sports labs Building 176 -meeting Dr Joe Banks, Agata Tomaszewska, DrJon Downes and Sophia Schillae.


James Bowker and Cath Hollyhead used the wavemakers to demonstrate Fleur’s impressive wave crawling ability- just using wave energy to propel herself into and with the waves.
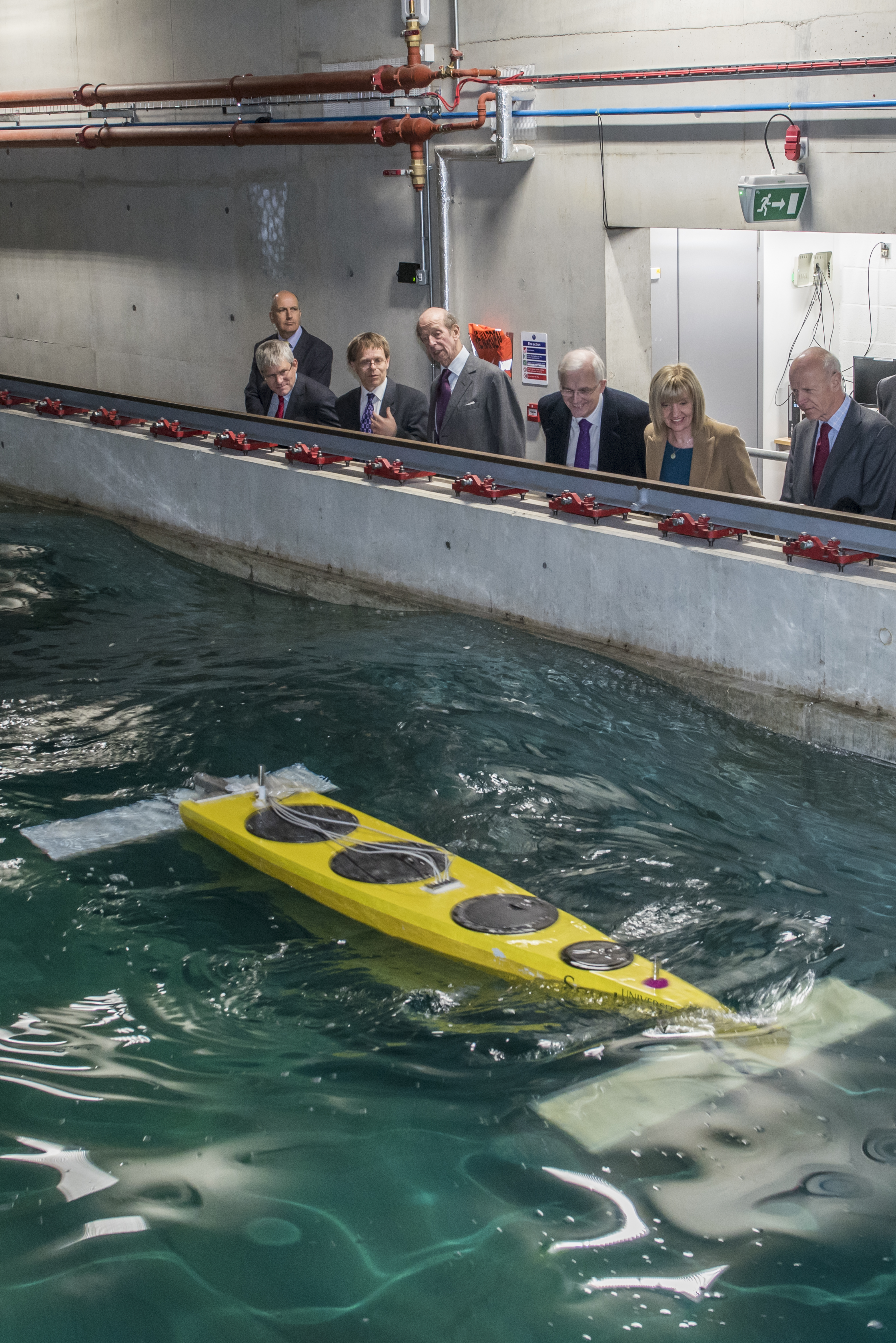
Commissioning of the tank instrumentation continues apace with recent tests on LDV, operation of the new rolling bridge as well as regular use of the Qualisys optical motion capture system. The InnovateUK project led by PlanetOcean associated with the design of an ASV launchable AUV ecoSUB has reached an important milestone with the recent vehicle’s official launch at the NOC. Soon after a prototype was being tested in the towing tank.
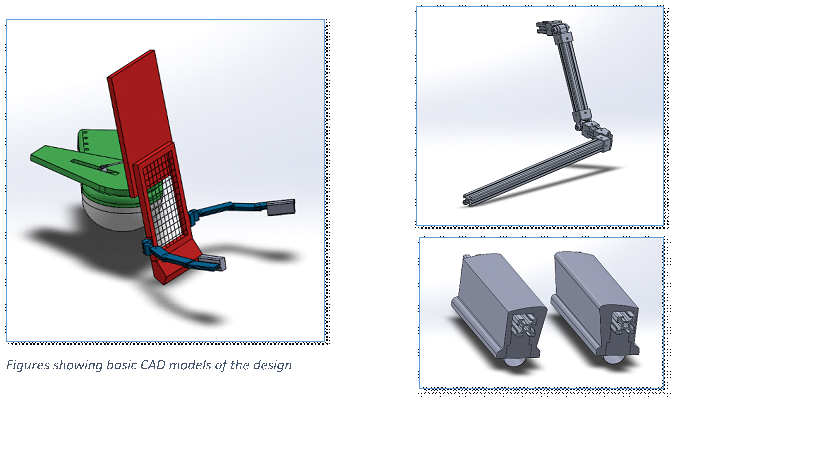
GDP 43 Life saving transformers
The Transformers GDP is a team of eight fourth year engineers: seven of whom are mechanical engineers with one aeronautical student. The project is supervised by Dr Nick Townsend from FSI.
Drowning is a huge worldwide problem, which puts thousands of lives at risk every year:
- 372,000 drowning fatalities per year (WHO, 2016),
- 1,000,000 rescues per year (ILSF, 2016),
- Few victims are ever wearing a lifejacket (CDC, 2016).
A frequent risk for lifesavers is being pulled under the water by a drowning person. Therefore, the project intent is to improve lifesaver safety; the robot will save a person from drowning before the lifesaver begins to rescue them from the water. Passive lifesaving robots exist, such as the EMILY robotic buoy (http://emilyrobot.com/portfolio-gallery/photo-gallery/ ), but none exist to actively save lives.
The project aim will be to; design, build and test a working prototype of a marine lifesaving robot, to actively secure casualties in the water. The team will accomplish this by achieving the following:
- Literature review of drowning casualties, existing lifesaving techniques and technology and the human body form whilst drowning,
- Define the anthropometric maxima and minima for an identified human group at risk of drowning for the robotic device to wrap around,
- Design a robotic mechanism to aid lifeguards in securing drowning casualties,
- Research and develop a sensing and control system to allow the device to work semi-autonomously,
- Build a working prototype of the design,
- Perform a realistic, in-depth testing procedure on the device.
GDP 23: Hydrofoiling Catamaran Experimental Research Platform
In recent years there has been an increasing trend of utilising hydrofoils to reduce drag and enhance the performance of high speed sailing vessels, following the developments of the International Moth class and the AC72s in the 34th America’s Cup. With this current interest growing within the marine industry, it is an exciting opportunity to establish a research platform acting as an interface to effectively carry out experimental testing of innovative hydrofoil technology.

Our aim is to create this research platform by retrofitting a NACRA F18 catamaran using two J-shaped foils to facilitate foiling. In addition, two T-foil rudders will be designed and manufactured from composite materials. A pod system inserted onto the existing daggerboard cases, seen in Fig. 1, will also be developed to attach the J-foils to the side of the boat. The rudders will be designed to have interchangeable wings, allowing for different combinations of main foils and rudder tips to be used. This will permit the investigation into effects of alternative designs. These are the two main features that affect the forces acting on the boat and are therefore very important when developing a foiling craft.

In order to analyse the boat’s response to real world conditions and to collect performance data such as speed, acceleration, roll, rate of turn and foils force, a suitable data acquisition system will also be developed. We aim to provide a good basis for further hydrofoil research to be carried out within the University and hope to encourage more curious minds to pursue naval architecture!

If you want to find out more about the project as it goes forward please visit their facebook page https://www.facebook.com/TheVolantiProject/
Pipefish triumphs at AUV2016
At the start of November, Artur Lidtke (FSI), Daniel Roper (NOC), Georgios Salavasidis (NOC and UoS), Jon Downes (FSI), and Sophia M Schillai (FSI and NOC) headed to Tokyo for the AUV2016 conference.
From newest AUV developments in sensors and navigation to multi vehicle cooperation, the AUV2016 conference covered the current state of the art in Autonomous Underwater Vehicles. Our own contributions ranged from Computational Fluid Dynamics for the EU H2020 Bridges glider project, to vehicle risk and safe navigation of AUV in unknown terrain with restricted sensor input and novel power supply solutions.
Besides presentations, the conference included a demonstration of the impressive AUVs at the University of Tokyo and a student competition for designing a novel AUV, in which Sophia managed to impress the 8 international judges and placed first with her Pipefish AUV.
On the last day, group discussions on the current gaps in AUV development gave us the chance to exchange ideas and get the perspective of experienced AUV researchers from across the world.
After the conference we were given a tour of the headquarters of JAMSTEC (Japan Agency for Marine-Earth Science and Technology), including their newest research vessel KAIMEI, the manned submersible SHINKAI and the 10 m long URASHIMA AUV.
IMAGE CAPTION: Blair Thornton, who has now joined us in Southampton, showing the BOSS-A AUV to Artur and Sophia at The University of Tokyo