Only 5% of the world’s ocean floor have been mapped, collecting data at these depths provides a significant challenge. This project aims to design a deep-sea research platform, in the form of an Autonomous Underwater Vehicle.
If you want to find out more about the project, please visit our Facebook page: https://www.facebook.com/AtlantisUnderwaterRobot/ The robot will do the following;
- Travel to depths of 100m.
- Carry a payload of sensors and cameras that can collect images and data.
- Uses a flapping foil mechanism for propulsion.The robot will be bioinspired with oscillating foil propulsion; this will provide increased manoeuvrability.
This project involves designing, building and testing a full-scale robot. The team will carry out the following tasks to complete the project:
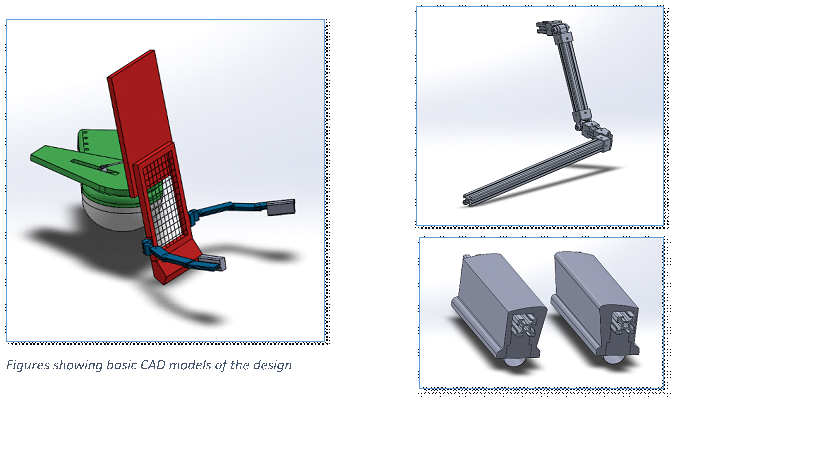
- Developing the conceptual design
- Modelling and optimising an interacting flapping foil mechanism
- Carrying out material testing for the hull and foil materials to determine if they can withstand operating conditions at 100m depth
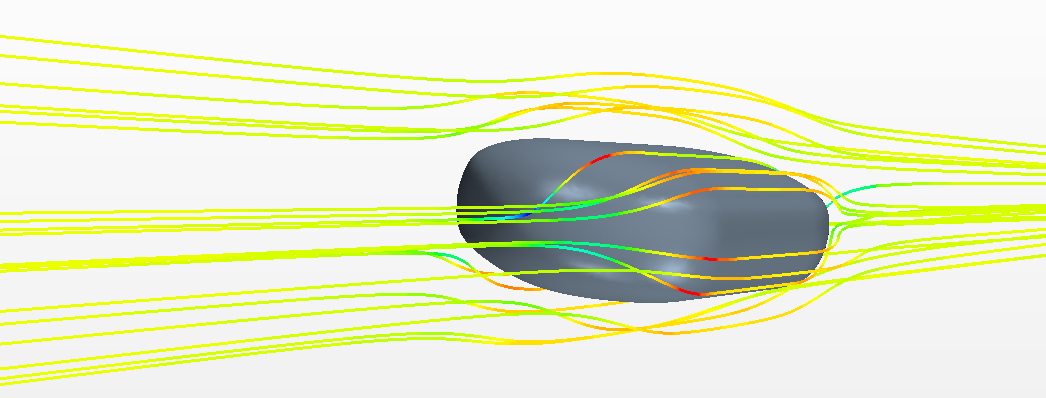
- Modelling the hull under operating conditions using FEA, and reinforce the structure where necessary
- Manufacturing and testing the separate elements of the AUV
- Programming the AUV so it is capable of operating autonomously underwater, navigating a pre-set path.
- Test the robot at a depth of 3m