Terrestrial Laser Scanners (TLS)
The aim of this section is to introduce you to Terrestrial Laser Scanners and the technology and principles of operation behind them.
Introduction to Terrestrial Laser Scanners
TLS technology is based on Light Detection and Ranging (LiDAR) and is also referred to as ground-based LiDAR or tripod LiDAR. It is an active imaging system whereby laser pulses are emitted by the scanner and observables include the range and intensity of pulse returns reflected by the surface or object being scanned. Some instruments are capable of measuring multiple returns or even the full waveform of the reflected pulse. LiDAR measurements, combined with the orientation and position of the scanner, produce a 3-dimensional “point cloud” dataset. The primary capability of TLS is the generation of high resolution 3D maps and images of surfaces and objects over scales of meters to kilometers with centimeter to sub-centimeter precision. This allows for high accuracy mapping as well as the determination of surface changes over time via repeat measurements.

Image source: Unanco 2009 Antarctic Campaign
TLS is a powerful geodetic imaging tool ideal for supporting a wide spectrum of user applications in many different environments. Geoscience applications to date include detailed mapping of fault scarps, geologic outcrops, fault-surface roughness, frost polygons, lava lakes, dikes, fissures, glaciers, rivers, columnar joints and hillside drainages. Repeat TLS surveys allow the imaging and measurement of surface changes through time due, for example, to surface processes, volcanic deformation, ice flow, beach morphology transitions, and river bank erosion. The incorporation of GPS measurements provides accurate georeferencing of TLS data in an absolute reference frame. The addition of digital photography yields photorealistic 3D images.
How does TLS work?
TLS operates under the same principles as airborne LiDAR, where a pulse or wave of laser light is emitted and then some reflection is recieved. Most ground based LiDAR systems are pulse based systems. The short video below introduces the basic concepts of TLS and also shows some nice examples of applications and point cloud data.
Advantages of TLS
TLS share many of the advantages of airborne platforms; they can operate at day or night, they can efficiently acquire millions of elevation points per hour, the data is fully digitised into an x, y, z point cloud, they are non-intrusive and highly accurate. In terms of the accuracy of the data, TLS can collect measurements with an positional error of approximately 4mm. The fact that the instruments are ground based means that they are highly manoeuvrable and allows then to be set up to scan areas that are less suitable for aerial surveys such as cliffs, bluffs and river banks, as well as walls of buildings etc.
The Leica Scanstation TLS
Geography at University of Southampton own and operate a TLS from one of the most popular manufacturers of TLS equipment, Leica. The Scanstation (see image below) is used for a range of research which relies on detalied topographical data series, ranging from beach and dune field evolution to river bank erosion and paleohydrological studies.

The equipment is highly portable and the operational setup is self contained through the use of a portable generator to run both the head unit (pictured above) and the laptop computer which is needed to operate the TLS. Bespoke software (Leica Cyclone) is needed to operate the TLS and process the point cloud data. In the next section of this unit you will get the opportunity to use this software to view some sample data collected with the Leica Scanstation.
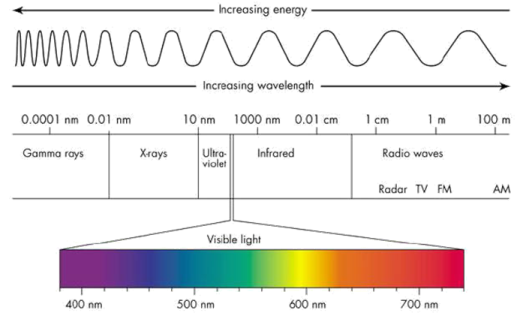
The Scanstation uses a single spectral waveband of 523nm green laser. The figure below shows that this is within the visible light spectrum, but as the light is stimulated (i.e. LASER – see introduction to LiDAR section) it is higher energy than normal green light.
The equipment is capable of collecting approximately 4000 points per second depending upon the range of the target objects. The maximum range of the sensor is approximately 300m given highly reflective surfaces. The spatial resolution of TLS is typically extremely high, for example the Leica Scanstation is capable of collecting data points at a point spacing of 2mm, giving us an almost continuous digital surface model of the surrounding topography.
Reflection
A terrestrial LiDAR system is to be used to map the face of a sea cliff to detect weathering changes with time. This will take multiple scans. What changes to the equipment could you do in order to speed up the survey. E.g. if the equipment took more scans per second, the overall survey time would drop. I can think of two more.
- Make the LiDAR laser more powerful and the scan angle smaller - this would allow less positions as the scanner could be put at a greater distance from the cliff.
- Simplify any setup procedure so that takes less time when moving.
Incorrect
Operational consideration of TLS
There are a number of issues that can arise when trying to complete a survey of an area of interest using a TLS.
Shadowing
Shadowing is where the relief of the topography of the area of interest is such that it causes some parts of the point could to be very sparsely populated, for example behind a large boulder or tree. The figure below shows an example of shadowing in the encircled area.
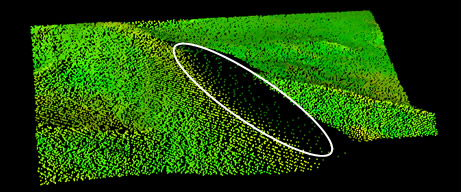
Shadowing can be mitigated against through a careful scanner location design in the field. In the case highlighted above, we could move the TLS to scan from the left of the image to capture the data in the sparsely populated part of the point cloud. This is called convergent scanning. When we undertake sets of convergent scans, special targets are required that remain fixed throughout all of the scans. These are then used to knit all of the convergent scans together in a process known as ‘registration’.
Mixed pixel returns
Mixed pixels are a phenomenon that occur when there are two surfaces (at different distances) within the footprint of the laser. E.g. in the figure below the laser is pointing at the edge of the log (dotted line) but receives returns both from the log and the ground beyond it because of the finite size of its footprint. This leads to a return signal that appears to lie somewhere between the two. The problem is commonly encountered at very abrupt changes in elevation such as at the crest of an area of higher relief.
Removal of mixed pixel artifacts relies on careful post-processing of the data, either manually or using automated search window filters. See Lichti et al. (2005) for further discussion.
Multi-choice
What is the relative spatial resolution of TLS compared to other methods of collecting topographic data (e.g. Photogrammetry, Airborne LiDAR)?
Correct
Correct - TLS data has a spatial resolution of up to 2mm, this is extremely high and means that we can characterise the topography as an almost continuous surface.
What is the relative spectral resolution of a TLS?
Correct
Correct - A TLS only collects data in one spectral band (523nm green laser).
Incorrect
Incorrect - TLS has only one spectral band, an example of a medium spectral resolution sensor would be Landsat TM which collects data in seven spectral bands.
Incorrect - TLS has only one spectral band, an example of a high spectral resolution sensor would be AVIRIS which collects data in 224 contiguous spectral bands.