Airborne Laser Scanning
The objective of this unit is to introduce the various components of an airborne laser scanner and the mechanism of data acquisition, with some reference to commercial airborne LiDAR data suppliers.
A typical Airborne Laser Scanner (ALS) system has the following components:
- Basis laser ranging unit.
- Electromechanical device for scanning.
- Electronics unit containing hardware for the processing functions of the system.
- Differential GPS/IMU for positioning. Allows georeferencing and therefore practical use of data collected.
- Software: recording, storage and processing of data. Post flight processing needed to produce a LiDAR point cloud.

Most of the ALS system uses the NIR part of the electromagnetic spectrum. The electromechanical device generally uses a mirror located in front of the laser and sends out pulses at known angles allowing cross track scanning to the longitudinal profile (motion) of airborne platform. The scanner contains a control and orientation system which records raw navigation data (GPS coordinates) and angular encoder values. The differential GPS processing requires ground reference GPS data from one of four sources:
- GPS receiver at a base station.
- Wide area service (eg. OmniSTAR) using satellite broadcast technology providing real time corrections based on network of reference stations.
- Data from a local network of reference stations.
- PPP (precise point positioning) technology based on precise orbits and clock corrections for satellites provided by IGS, based on worldwide network of base stations.
Differential GPS (DGPS) corrects for navigation errors by using a base station which calculates the difference between a known location and satellite signals and broadcasts this difference. Real time DGPS continually broadcasts the difference between received satellite signals and known locations as it receives the data.
Reading Activity
It is recommended that students read the following paper which provides an overview of the ALS system. A copy is available on the course Blackboard site.
Wehr, A. and Lohr, U. (1999) Airborne laser scanning—an introduction and overview. ISPRS Journal of Photogrammetry and Remote Sensing 54:68–82.
The following link provides more information on DGPS: http://www.esri.com/news/arcuser/0103/differential1of2.html
Reflection
Why do you think most Airborne Laser Scanner (ALS) systems use the NIR part of the spectrum?
This is because the NIR part of the electromagnetic spectrum is highly reflective from both ground and vegetation. Thus there is less chance of signal attenuation compared to the visible part of the spectrum.
Incorrect
Scanning Mechanisms
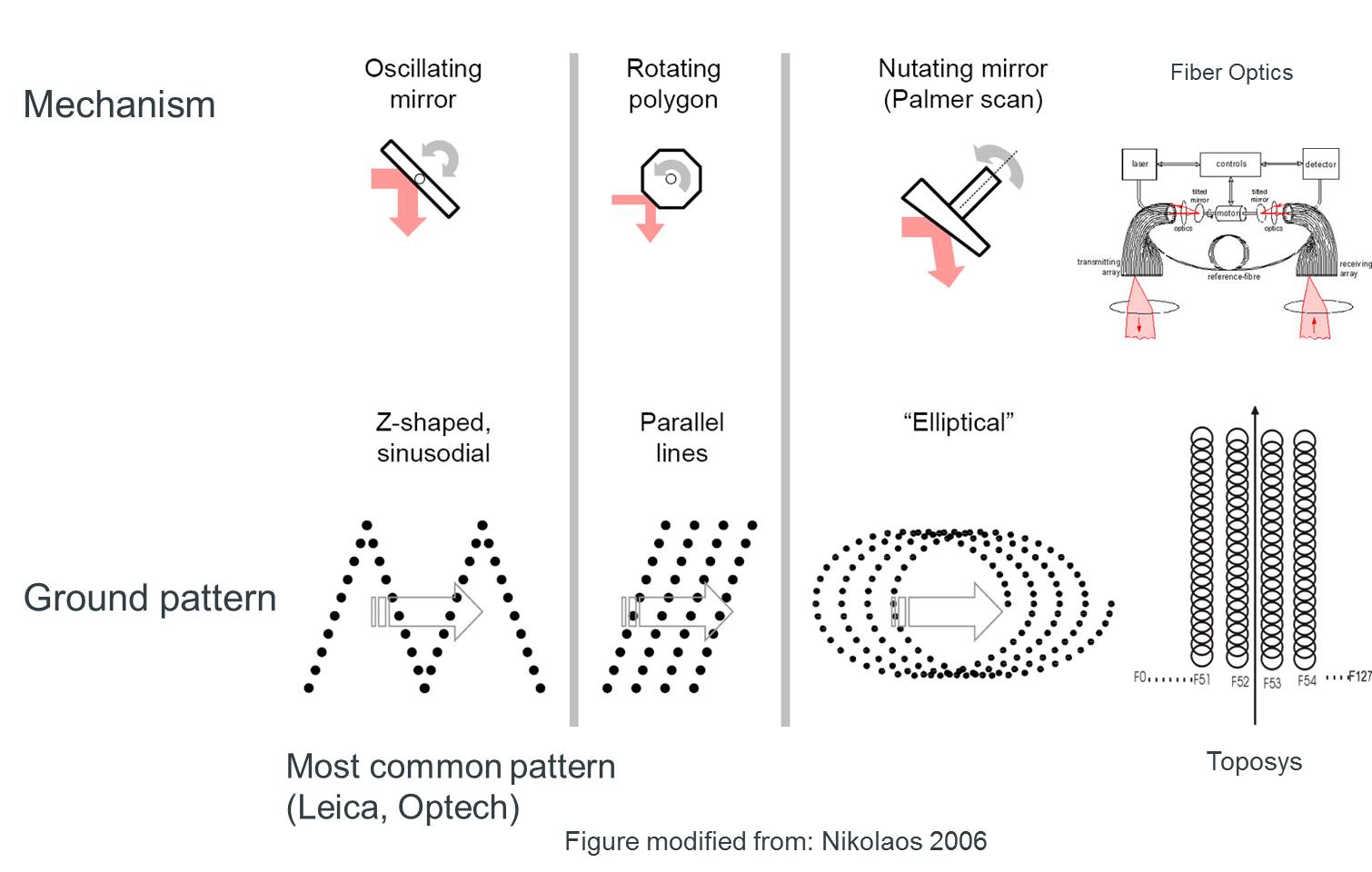
For airborne LiDAR scanners, the aim of the scanning mechanism is to scan fast enough to compensate for the forward movement of the platform. Currently four main scanning systems are used by operational ALS systems:
- Oscillating mirror
- Rotating polygon
- Palmer
- Fibre optic
The polygon and palmer scanner are faster scanners than the oscillating mirror scanner. Fibre scanning systems have the advantage of a high scanning speed, no moving parts (so stable during scanning) and identical transmitting and receiving optics. Each scanning mechanism produces a different ground pattern.
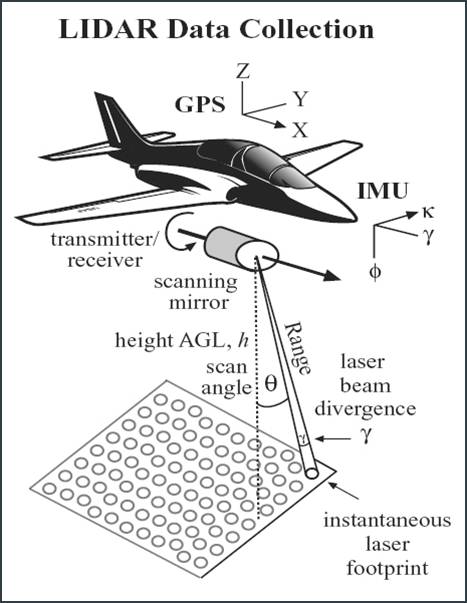
Laser footprint
Laser footprint is a measure of spatial resolution of the system. The laser footprint is approximately circular on the ground and varies with the scan angle and the topography encountered. The diameter of the instantaneous laser footprint (Fpinst) on the ground is computed by

where h is the altitude of the aircraft above ground level,  inst is the instantaneous scan angle under investigation, and γ is the divergence of the laser beam.
inst is the instantaneous scan angle under investigation, and γ is the divergence of the laser beam.
The across-track swath width (sw) is given by

Where is the scan angle.
Major commercial airborne laser scanner data suppliers include those listed below.
- Optech, Canada (Airborne Laser Terrain Mapper)
- Leica Geosystem, USA, ALS40/50
- Riegl, Austria, LMS-Q series
- TopoSys, Germany, Toposys Harrier
- Topeye, Sweden
- Terapoint, USA
Unassessed Assignment
This unassessed assignment will help you to broaden your knowledge of commercial LiDAR data providers.
Select any three commercial airborne laser scanning suppliers from the list above and find about the laser scanner they use in data collection.
Compare between their systems (including: wavelength used, scanning mechanism, accuracies, uniqueness (if any). A table would be the most appropriate way to record your comparison.
Find at least one study (scientific/ industrial) that used each of these systems.
You should submit your comparison study through the course Blackboard site.