Introduction to LiDAR
This section aims to introduce the principles of operation behind LiDAR and LASER instruments and focusses briefly on airborne systems prior to the introduction of ground based Terrestrial Laser Scanning instruments (TLS) in the next section.
The focus of this unit is Terrestrial LiDAR systems, and the introduction to the key principles of LiDAR below focuses mainly on the technology and principles that underpin this type of system. A brief introduction to airborne systems is introduced, as they are the most common type of LiDAR encountered. More details on airborne and spaceborne LiDAR systems will be presented in later units.
What is LiDAR?
LiDAR (which is an acronym for Light Detection And Ranging) measures distances by sending pulses of LASER (Light Amplification by the Stimulated Emission of Radiation) light that hit an object of interest and are reflected back to a receiver. The LiDAR system then measures the time for the pulse to provide a return. The measured times are converted to a distance from the sensor, (D), using the formula:
D = c x t/2
where c is the speed of light in m per second and t is the return time following the transmitted pulse.
Since LiDAR is an active sensor, LiDAR data can be acquired day or night – as long as the atmosphere is clear. LiDAR generates very large datasets, it is not uncommon for the system to collect in the region of 4 thousand (TLS) to 100 thousand positions (airborne systems) per second. Despite their large size, the data can be post-processed to provide highly accurate and detailed Digital Elevation Models (DEMs); topographic maps; vegetation heights, structure and densities and more (depending on how the data is collected).
Variations of LiDAR
There are several variations of LiDAR including terrestrial (covers both airborne and ground based confusingly!) and atmospheric LiDAR. Within terrestrial LiDAR there are variants of surface and bathymetric LiDAR. Even further divisions exist within surface LiDAR including discrete and waveform LiDAR. Terrestrial Laser Scanners are classified as discrete terrestrial surface LiDAR systems.
Airborne LiDAR
As the next part of this unit will focus exclusively on ground based TLS, here we focus briefly on airborne LiDAR systems. LiDAR sends thousands of laser pulses to the ground every second. The pulses are directed from the plane using an oscillating mirror. This results in a dense set of data points arranged in a ‘sweep’ underneath the plane’s flightline. The laser pulses strike the target(s) and are reflected back to the laser detector on the aircraft. The detected reflections are allow accurate distances from the sensor to be measured. An airborne Lidar system consists of several advanced technologies that allow conversion of the distance-from-sensor data into accurately georeferenced data in near real time. This greatly facilitates getting the LiDAR data into GIS applications.
Differential GPS techniques are used to determine the precise x, y, z position of the aircraft. An inertial navigation system (INS) is used to determine the precise orientation of the aircraft and the orientation of the scanning mirror.
With the aircraft’s position and orientation known and the orientation of the scanning mirror known, the LiDAR distance measurements can be converted to map coordinates and elevations with large areas being mapped by flying multiple, parallel and overlapping flightlines.
The short video below outlines the principles of airborne LiDAR systems.
Reflection
If you view this video http://www.youtube.com/watch?v=eoKwZj1UsRg you can see that LiDAR picks up better data from the tops of trees than the sides. Why is this? What can be done about it?
LiDAR picks up reflections from the laser only which was pointing vertically downward. Thus it collected many more points from the tops of the trees than the sides.
To compensate for this you could either orient the laser at more of an angle or switch to ground based LiDAR (although this would be very much slower)
Incorrect
Applications of Airborne LiDAR
As mentioned above, this area will be covered in detail in later units, but some applications are introduced here to highlight the importance and scope of airborne LiDAR systems:
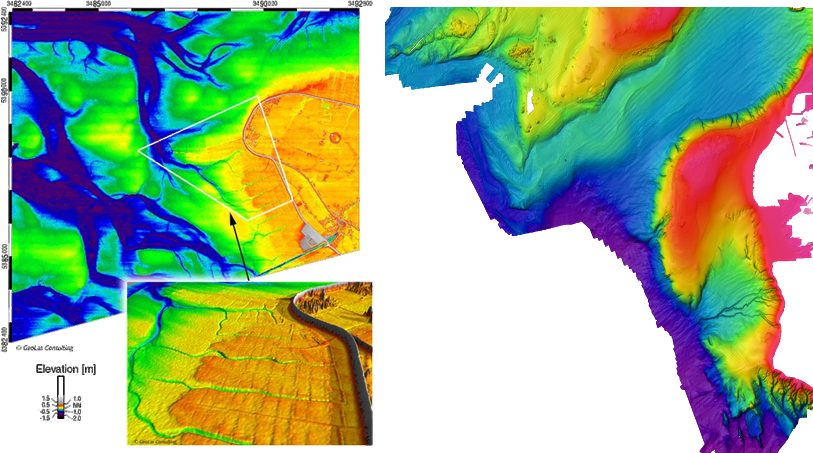
Bathymetric data collection
Bathymetric data is extremely useful for studying the submerged sea and river beds and can be used in a range of applications such as navigation, resource exploration and underwater archaeology. The effectiveness of the technique relies on the water being fairly clear.
Sources: Below left: http://www.geolas.com/Pages/Coast.html, right: https://www.ngdc.noaa.gov/mgg/bathymetry/multibeam/irish_data.html
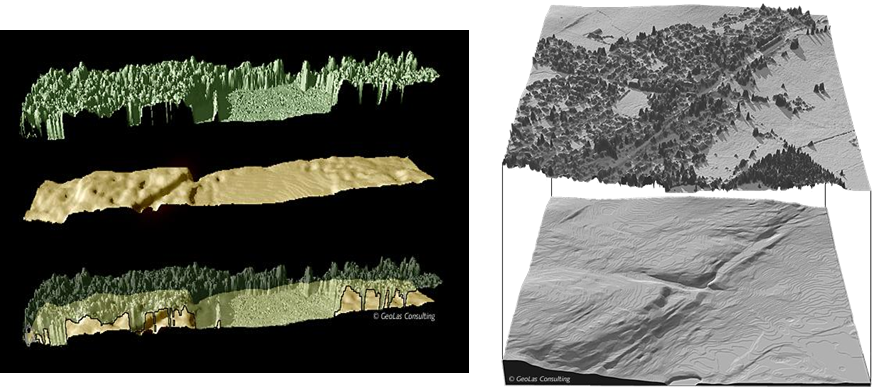
Forest Mapping
LiDAR is a useful tool for forest mapping because many airborne (and some ground based) systems can collect multiple returns of reflected laser light. This means that if the first return is from a forest canopy and the last return from the bare earth, canopy elevations and thus biomass estimates can be made.
Source: http://www.geolas.com/Pages/Vegetation.html
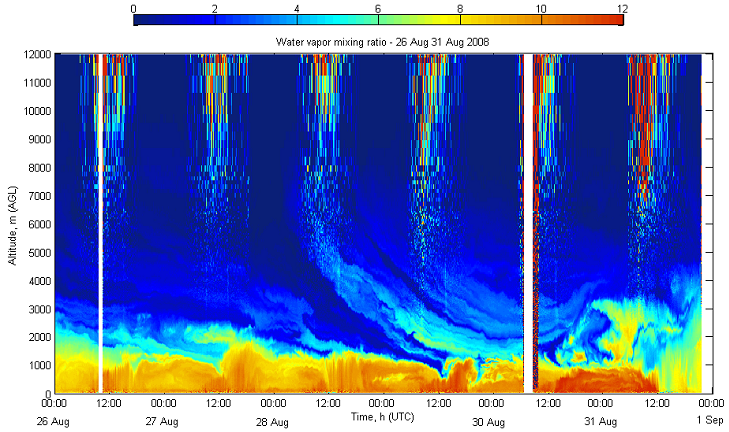
Atmospheric monitoring
LiDAR can be used to monitor many atmospheric gasses, and the image below shows a continuous surface representation of the ratio of water vapour mixing for 12km of atmosphere for a 1week period. In this application of LiDAR the laser points vertically upwards, the X axis on the graph below represents time rather than being distance.
Source: http://www.alg.umbc.edu
Airborne LiDAR – sources of error
There are many potential sources of error with the collection of airborne LiDAR data. It is important to have an understanding of the sources of error because only then can we quantify the elevations of the collected data with some bounds of uncertainty. This will impact the smallest detectable changes in elevation that can be measure, or in other words, what topographic features we can measure above the noise from the signal. Some of the key sources of error are summarised below:
- Sensor error e.g. pulse timings, laser scan angle.
- Positional error (GPS and INS integration errors).
- Reflective properties of targets.
- Specular (where the surface acts like a mirror) versus diffuse reflection may lead to spurious data points. In effect the receiver is ‘dazzled’ by very strong reflections whereas a diffusely reflecting target is less bright and can be processed normally.
- Divergence of ground properties in the laser footprint
- Varies with range: further away targets leads to a greater footprint which may lead to varying reflective and geometric properties within the footprint. In effect, a single measurement comes not from a target a few mm square in area but many cm in area – the surface is more likely to be mixed and the larger surface is likely to vary more in terms of distance from the LiDAR mirror.
LiDAR accuracy generally reported as Root mean Square Error (RMSE) of vertical accuracy using Ground Control Points (GCPs) of known elevation:

where  is elevation at a given point,
is elevation at a given point,  refers to collected data points,
refers to collected data points,  refers to GCPs and
refers to GCPs and  is the total number of points.
is the total number of points.
Reflection: Applications of LiDAR
Spend some time searching the web for other applications of LiDAR data. There are a surprising number of fields which make use of this type of technology.
All of the following areas make use of LiDAR data (source: wikipedia):
Agriculture
Archaeology
Biology and conservation
Geology and soil science
Hydrology
Meteorology and atmospheric environment
Law enforcement
Military
Physics and astronomy
Robotics
Surveying
Transportation
Wind farm optimisation
Incorrect