Plane vs Differential Rectification
The objective of this learning object is to introduce and compare two different types of image rectification – plane and differential – and to gain a basic understanding of their application.
Image rectification is a transformation process to bring an image from one coordinate system into another coordinate system or to correct coordinates within the same coordinate system.
The term ‘rectification’ hints at the possible positional image distortion produced due to the geometrical inefficiencies of a camera or sensor by transforming the image into a standard ground coordinate system. There could be several sources of image distortion i.e. attitude, velocity of sensor platform, panoramic distortion, earth curvature, atmospheric refraction, relief displacement, nonlinearities in the sweep of a sensor’s Instantaneous Field Of View (IFOV) etc. It is essential to remove those errors and make the image a reliable source of information. Depending on the complexity and mode of the rectification process, rectification systems can be categorised into two broad classes: i.e. Plane Rectification and Differential Rectification.
- Plane Rectification: This is the simplest way available in most standard image processing systems for rectification purposes and its mechanism is associated with applying a polynomial function to the surface/image and adapting the polynomials to a number of checkpoints (GCPs). The procedure is considered to be effective in removing the effect of tilt and is extensively applied on both satellite images (during the projection process) and on aerial photographs (during relative/inner orientation).
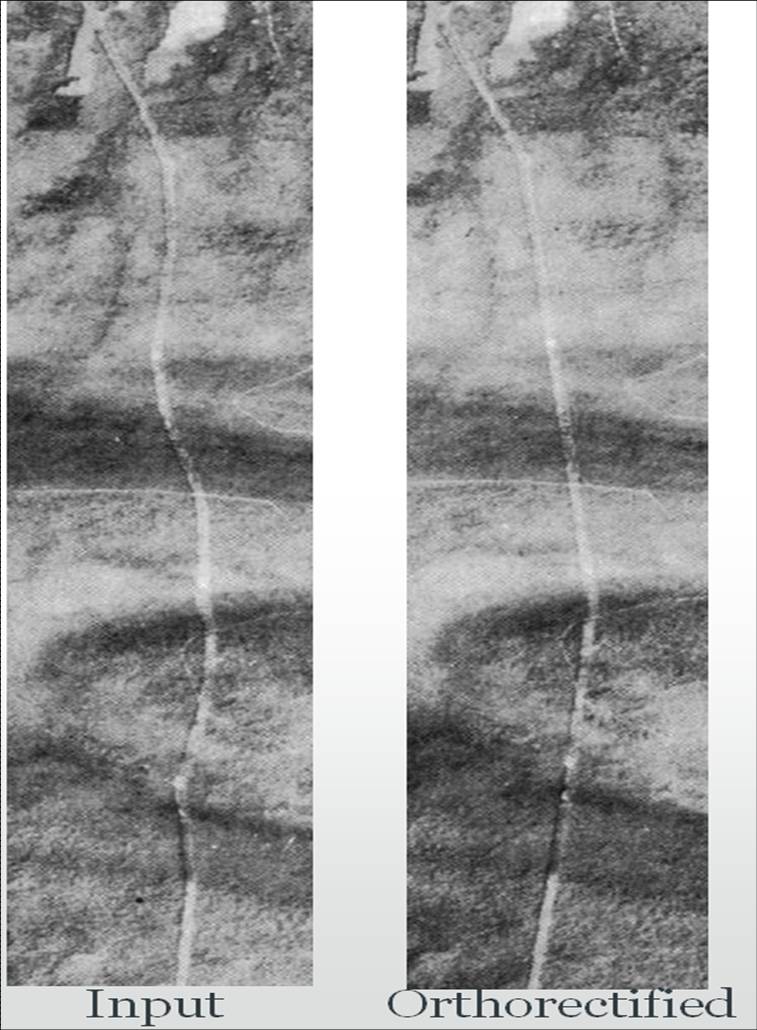
- Differential Rectification: This is a complex process and involves complex mathematical functions. The objective here is to identify a new correct location for each image pixel using elevation information at the pixel location and then assign the values from the original image (usually aerial images) to each of the new pixel positions. These processes can be effectively used for both aerial and satellite imagery. With aerial photos it is used during exterior orientation (i.e. transformation from camera coordinates to ground coordinates).