Types of Measurement
The objectives of this unit are to introduce different type of measurement techniques and the principles of discrete and waveform LiDAR.
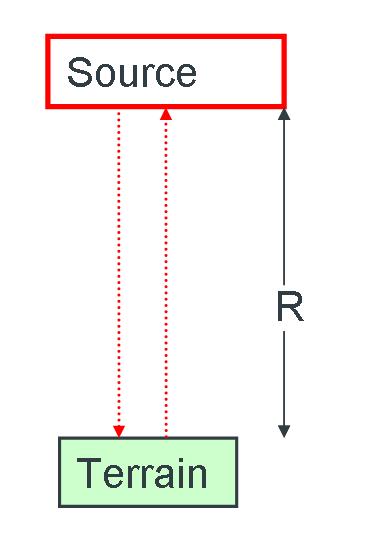
Laser ranging is the measurement of a distance (range R) between a laser ranger and an arbitrary point at a high level of accuracy. There are two methods of measuring this distance:
Firstly, accurate measurement of time of flight (TOF) for a laser pulse to travel from the laser ranger to a specified object and return to the laser ranger. This distance can be calculated:
R = v.t/2
Where, R= distance/range (slant range), v= known velocity of electromagnetic radiation t= time interval.
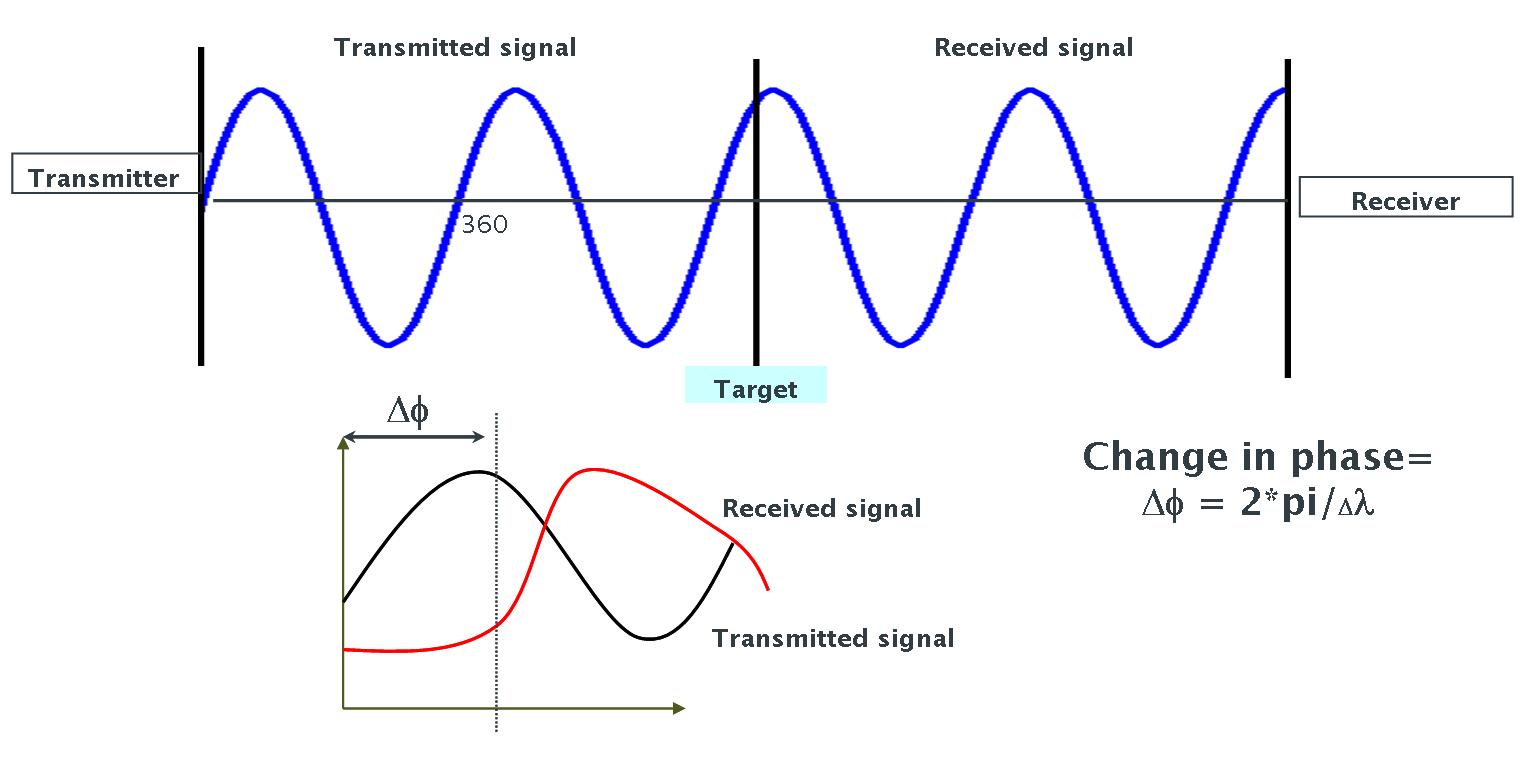
Secondly, phase comparison. In this case the laser scanner emits a continuous laser beam rather than a pulse. The distance between the scanner and an arbitrary point is determined by a comparison of transmitted and received sinusoidal wave patterns. The range is calculated by measurement of the phase difference (or phase angle) of the emitted signal to the received signal after reflection off the point being sampled. Digital pulse counting measures phase difference between emitted and received waves, therefore only a fraction of the total wavelength is measured. To obtain the final distance between the scanner and the point being measured the total number of wavelengths passed (integer) is added to fractional value.
Depending upon the nature of the signal being transmitted and recorded by a laser system they can be either a pulse ranging system or continuous wave system. In a pulsed ranging system, laser pulses are sent at continuous intervals of some nanoseconds and the time difference between the transmitted and returned signals is measured. In a continuous wave system the laser pulse is continuous and the phase difference between the transmitted and received signal is measured.
Based on the measurement technique involved or the type of laser transmitted and received (continuous or pulsed), the resulting dataset can be classified as either a full waveform or discrete return data.
Full waveform LiDAR
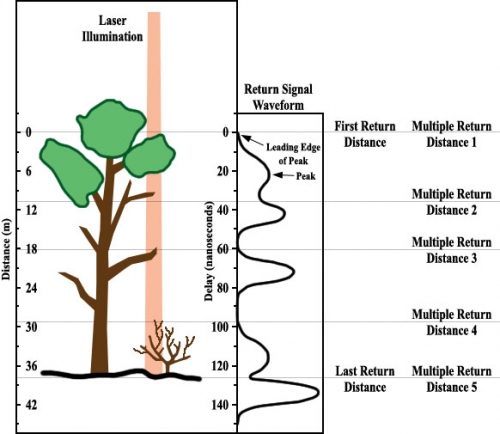
It is technically possible to record the entire waveform of the returning laser pulse as shown in the figure below. The output time series of returned pulses is digitised using an analog to digital converter to create a waveform representing the vertical structure of the target. A hard/flat target eg. bare ground results in a singular return peak (in generated waveform from time series of pulse returns). In some instances multiple return peaks can be returned from hard surfaces (e.g. laser footprint intersects building roof and surrounding ground). Scanning of vegetation with multiple vertically distributed layers results in multiple return pulses; pulse energy decreases with depth through the canopy. The pulse width is defined as the difference between the first and last returned pulses and represents the height of the object being scanned.
Discrete Return LiDAR
Discrete return ranging identifies peaks in the time series that exceed a detection threshold rather than producing a waveform. The heights of prominent layers/structures within the target illuminated by the laser pulse are recorded. This results in more efficient data storage than waveform returns. Discrete return systems are characterised by the number of returns per laser pulse that can be recorded. The range is the distance between the leading edge of the transmitted pulse and the leading edge of distinct peaks in returned pulses.
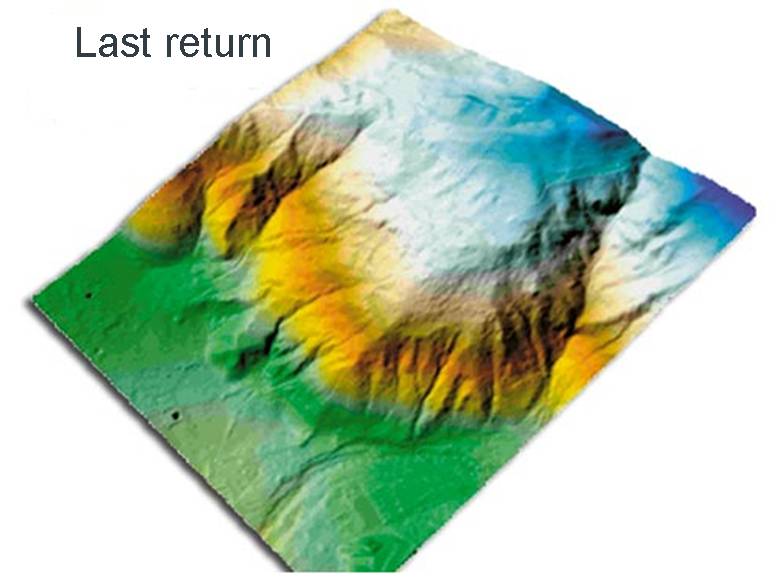
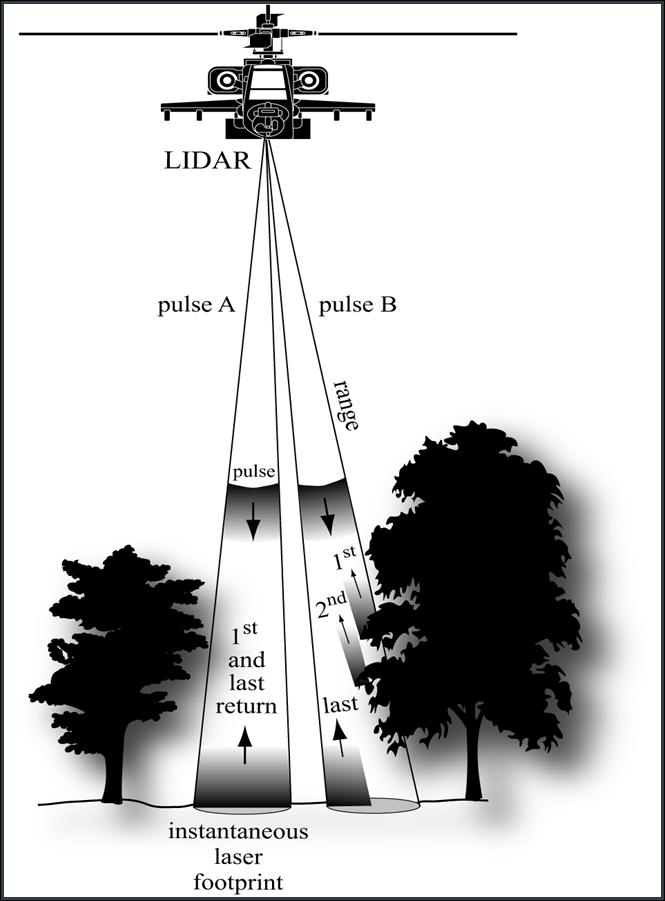
Earlier airborne systems were used to detect two returns: first return and last return. First return is the first part of the received signal representing the highest point in the footprint, whereas last return represents the last part of the recorded signal, representing the lowest point in the footprint. With recent developments in instrumentation and data storage we can now have multiple discrete return data sets.

Reflection
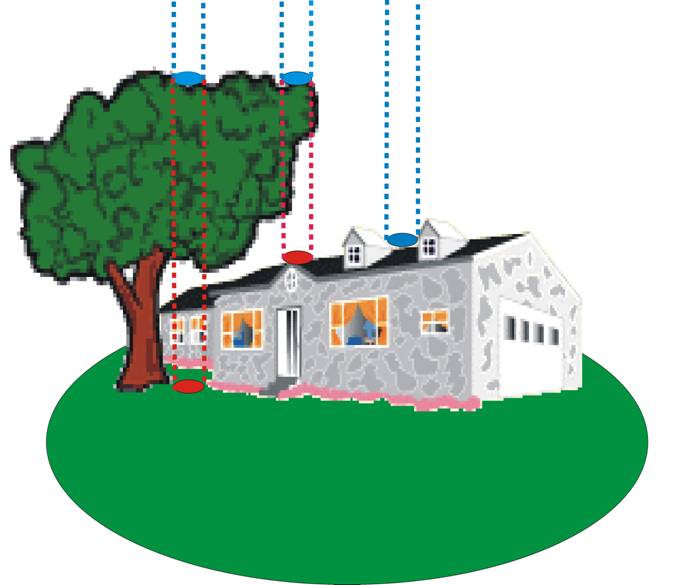
Based on what has been discussed here, can you predict which return will have the greater number of points in a forested environment? The first return or the last return - and why? When you have considered this, click below to see an explanation and diagram.
The first return will have more points, because in a forested environment the last return signal is very weak and attenuated. Most of the last return signal does not reach the sensor. This becomes more apparent when studying the illustration of multiple returns from a forested environment, below:
Incorrect