Pre-processing
This learning object explains some of the pre-processing techniques which should be applied to airborne LiDAR data.
Georeferencing
Accurate georeferencing plays a crucial role in use of any remotely sensed data. Traditional georeferencing techniques relied on the use of ground control points (GCP) as the only source of information. Acquiring GCPs after remote sensing data acquisition was expensive and time consuming. With development of technology it was possible to simultaneously integrate GPS location with airborne data acquisition and this led to the development of direct georeferencing.
Georeferencing of LiDAR data requires instantaneous position and altitude information for each point measurement. It requires three positional parameters (x,y and z) and three orientation parameters (Roll, Pitch and Yaw) for each measurement and in one strip of LiDAR acquisition we are likely to have thousands of points. Therefore use of GCPs is not sufficient to provide the necessary georeferencing information. Recent airborne LiDAR systems rely on direct georeferencing by integrating GPS and the aircraft’s inertial navigation system (INS), where the GPS receiver provides information on position and the INS provides information about orientation.
Reflection
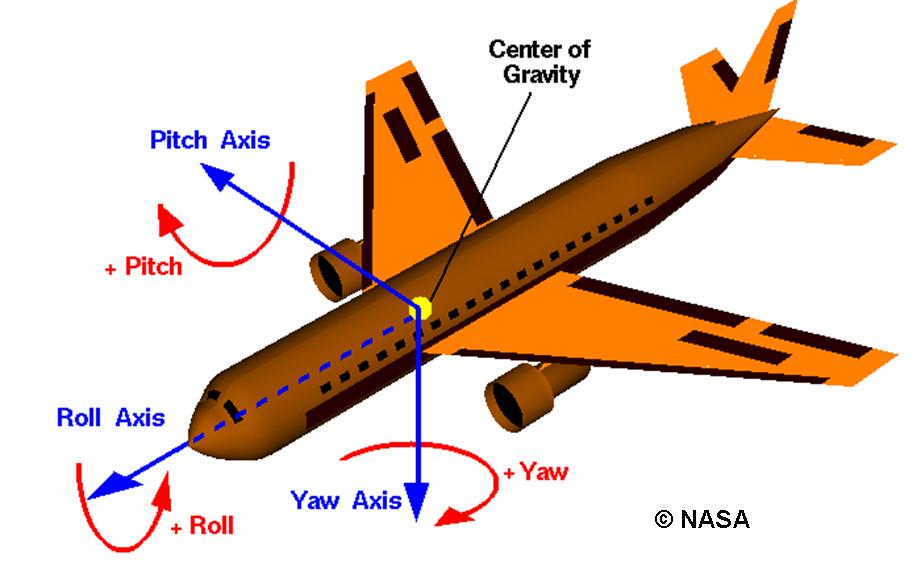
From your previous reading can you remember, how Roll, Pitch and Yaw relate to the orientation of an aircraft? Consider how these will impact on the direction of the LiDAR sensor carried by the aircraft.
Roll is the movement around the longitudinal axis, Pitch is the movement around the lateral/wing axis and yaw is the movement around the vertical axis.
Incorrect
Strip Adjustment
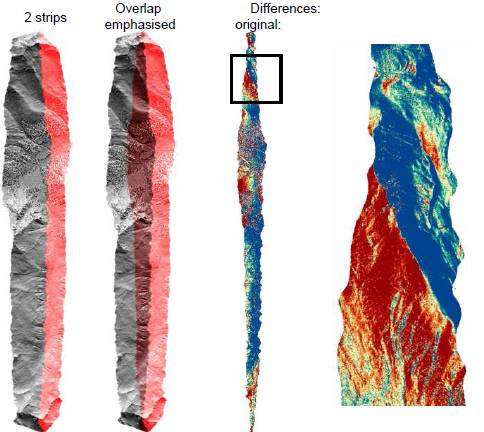
LiDAR data are acquired in strips and the overlap between adjacent strips can range from 10-30% to provide continuous coverage of the ground surface. Ideally there should be no difference between overlapping strips. However, quite often we observe measurable differences between overlapping strips due to sensor noise and performance of the georeferencing system. The figure below demonstrates the effect of strip differences: the zoomed figure highlights the difference between the strips. (The bluish tone is where the difference is low and the reddish tone is where the difference is high).
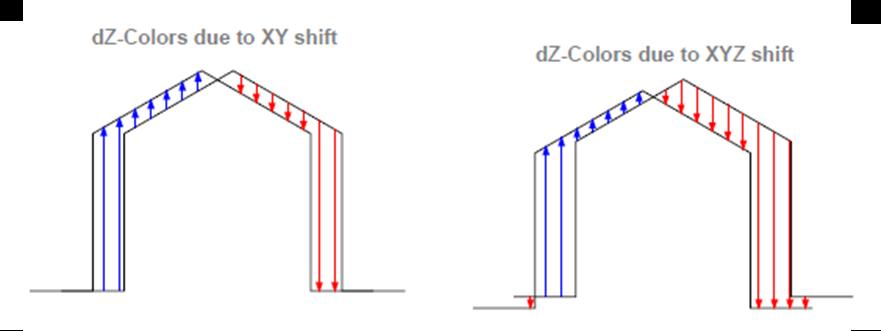
In general LiDAR strip adjustment involves two steps: first difference is identified and measured between two overlapping strips and then a geometrical model is used to transform the measurements of one strip to the other. The difference in elevation between the overlapping strips may be caused by a shift in X and Y location or can be due to changes in X, Y and Z of the overlapping strips.
Strip adjustment for LiDAR data has evolved over time and a number of algorithms have been proposed. Basic strip adjustment techniques can be classified as:
- Point to point matching
- Point to surface matching
- Surface to surface matching
- Line to line matching
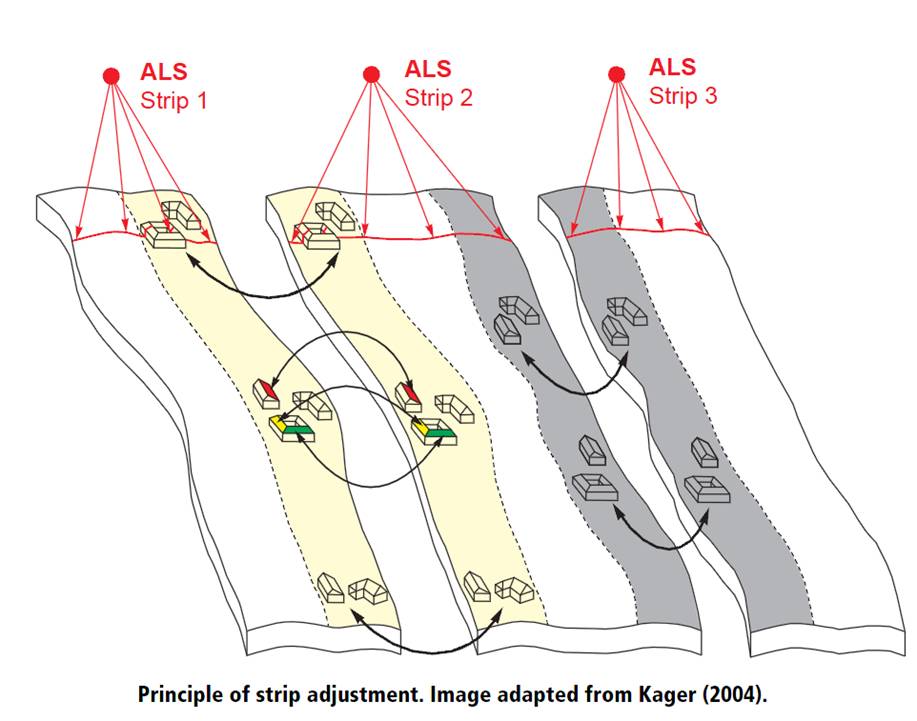
In point to point matching, suitable tie points are selected in both strips and a transfer function is applied to convert them to a common position. Because of the irregular spatial distribution of the LiDAR point cloud it is often difficult to find matching tie points in overlapping strips, therefore surface based strip adjustment techniques are preferred. The surface matching technique requires surface patches with sufficient data points that are covered in both overlapping strips with a minimum of three non-coplanar surfaces. Then least squares matching is applied to the LiDAR data by iteratively minimising the sum of height differences between the patches to determine the shift parameter in three coordinate directions. However, this method fails in vegetated areas or flat areas without any identifiable objects in them.
Activity
Students should read the following journal articles for a detailed description of the surface to surface matching strip adjustment techniques.
Kager, H. (2004) Discrepancies between Overlapping Laser Scanner Strips-Simultaneous Fitting of Aerial Laser Scanner Strips. International Archives of Photogrammetry and Remote Sensing Vol. XXXV, B1, Istanbul, Turkey
Filin, S., Vosselman, G. (2004) Adjustment of Airborne Laser Altimetry Strips. International Archives of Photogrammetry and Remote Sensing, Vol. XXXV, B3, Istanbul, Turkey