
- GDP2 at Boldrewood Innovation Campus
Last but not least of our series introducing this years Group Design Projects run from the ship science programme. The project aims to solve many problems that hull fouling causes, both environmentally and financially. To name a few:
- 39% of invasive species transported by shipping are found in the hull fouling (Molnar et al., 2008)
- A fouled hull leads to increased fuel consumption and carbon emissions (M.P. Schultz, 2010)
- Existing cleaning methods require the ship to remain in port
We are undertaking the design build and test of an autonomous hull cleaning robot, capable of regularly cleaning the hull of a ship while the ship is at operational speeds.
To achieve this we are going to:
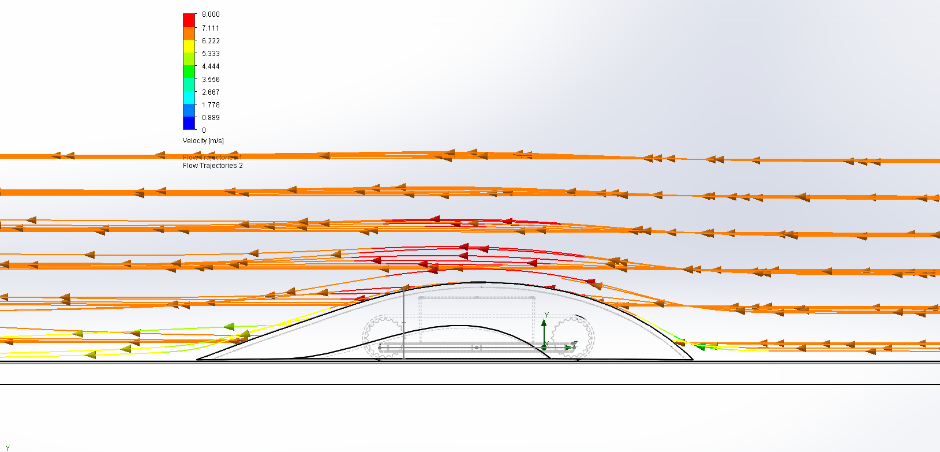
- Develop an attachment method capable of resisting the forces the robot is subject to at operational ship speeds.
- Develop the autonomous system which is able to navigate a defined area, maintaining knowledge of its position within the domain and avoiding obstacles.
- Design and test a body form which is optimised to aid the attachment method
- Manufacture the various elements of the robot to be tested individually
- Test the ability of the final assembly to perform under simulated operating conditions