
A team from the University of Southampton has successfully obtained the largest continuous visual map of the seafloor ever obtained in UK waters during a currently ongoing expedition to the Darwin Mounds. The expedition led by co-chief scientists Blair Thornton of the University of Southampton and Veerle Huvenne of the National Oceanography Centre (NOC), deployed underwater robots to map cold-water-coral mounds at a depth of 1000m in a Marine Protected Area (MPA).
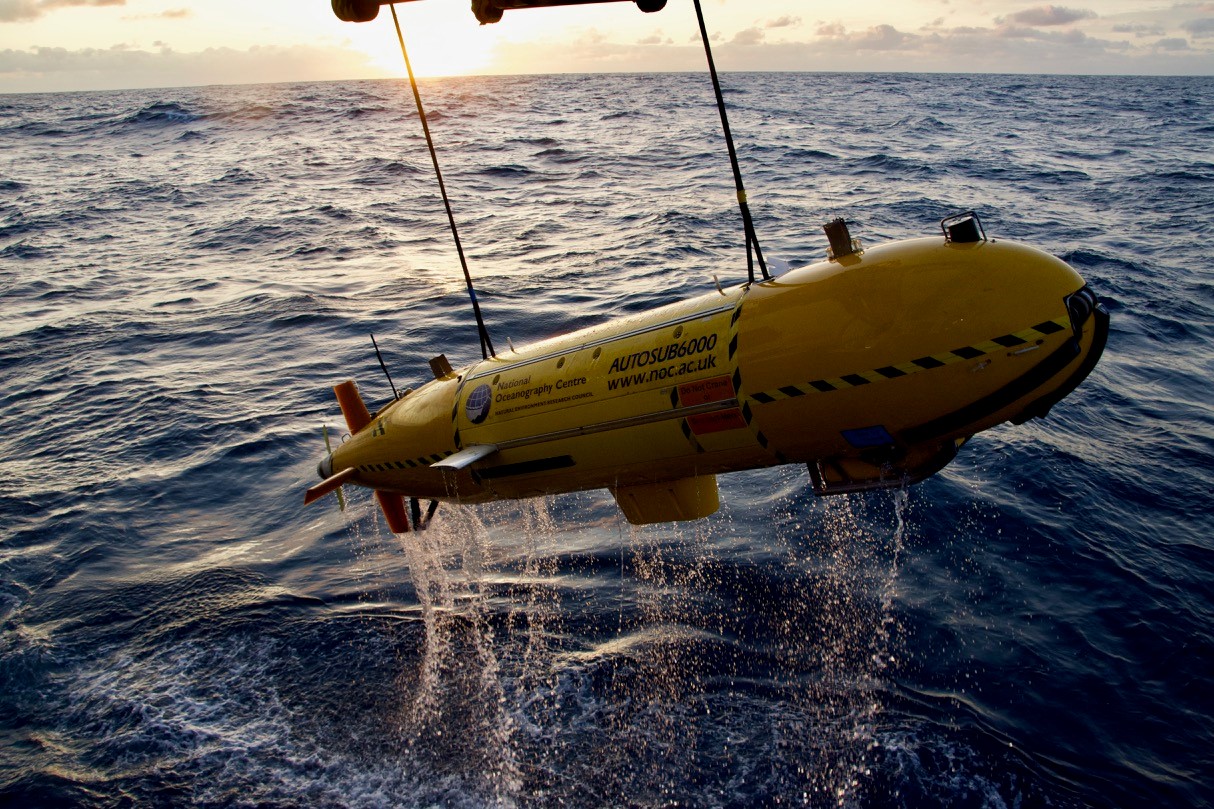
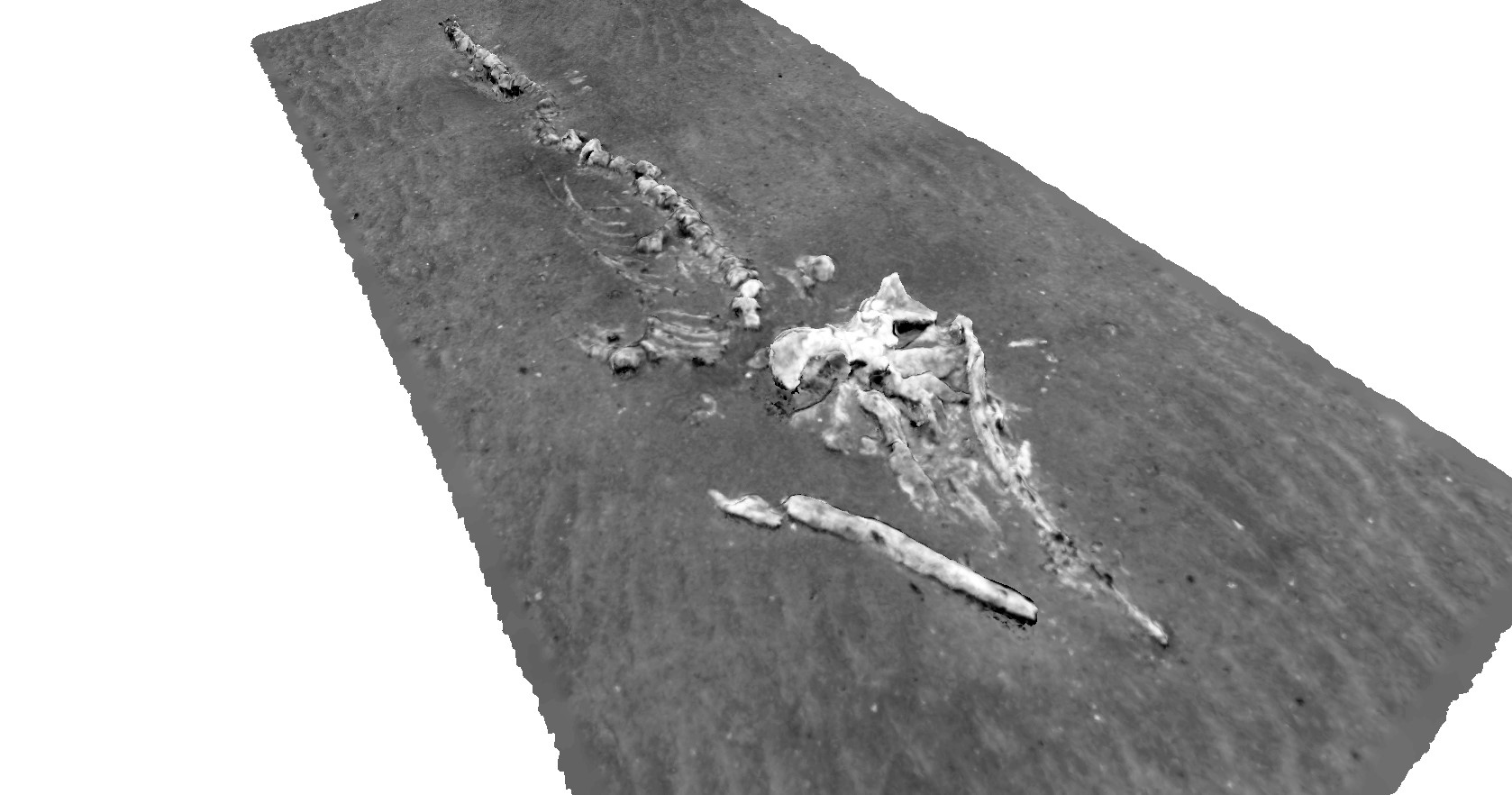
The autonomous robot, Autosub6000 of the NOC, was equipped with BioCam, a newly developed deep-sea 3D imaging system developed by the University of Southampton under the Natural Environment Research Council’s OCEANIDS Marine Sensor Capital program. During its first 24-hour deployment, BioCam was able to visually map the seafloor at 40 times the rate of conventional imaging systems, covering approximately 50 times the area of Wembley stadium’s football pitch. The example below shows one of the 650,000 images taken during the dive, showing diverse species of deep-sea life sheltering amongst the corals. BioCam also discovered a whale carcass more than 8 metres in length on the seafloor just a few hundred metres from a coral mound.

Blair Thornton, Associate Professor of Marine Autonomy at the University of Southampton says, “The large area and high level of detail in the visual maps BioCam collects can help scientists recognise patterns and features on the seafloor that would otherwise go unnoticed, allowing ecologists to compare sites and document changes over time at much larger scales than previously possible.”
He continues, “It is fantastic that the system delivered results from the word go. This was only possible because of a huge team effort, with staff and students at the University of Southampton, local industries, and the MARS team at the NOC working hard together to develop BioCam and integrate it onto the Autosub 6000. Huge credit also goes to the ship’s crew for safely deploying and recovering the system in less than ideal sea states.”
Veerle Huvenne, Team Leader for Seafloor and Habitat Mapping at the National Oceanography Centre explains “typically, scientists map out large scale spatial patterns in ecology by inferring relationships between sonar maps and short transects of visual imagery (photographs or video). BioCam’s ability to continuously image areas in 3D over tens to hundreds of hectares gives us the ability to directly observe patterns over entire habitats. This is a powerful new tool for scientists to better understand these fragile environments”.
Hayley Hinchen, Marine Habitats Monitoring Manager at the Joint Nature Conservation Committee says, “The data BioCam collects could support marine conservation by providing vital evidence at a large scale about how effective measures like marine protected areas are at conserving our environment, especially in fragile, complex habitats that can’t be physically sampled. The evidence gathered could help us understand how damaged areas of the seafloor recover with time in protected sites like the Darwin Mounds”
More information about BioCam can be found at the following website, https://ocean.soton.ac.uk/biocam
Regular updates about the current expedition are posted on www.projects.noc.ac.uk/class/blog
Link to BBC article – https://www.bbc.co.uk/news/uk-scotland-highlands-islands-49753440
Tag Archives: maritime robotics
2018 Open days coming soon
The Ship science team will be welcoming visitors this summer and autumn as part of the University of Southampton’s Open Days.
Talks will give opportunities to learn more about the maritime sector and the exciting careers possible with a degree in Ship Science as well as demonstrations in our impressive 138 m long , 6 m wide and 3.5 m long wave and towing tank.
Maritime is a rapidly growing sector where there is significant skills shortage. A recent article by the chair of Maritime UK, Ocean economy offers UK a trillion pound opportunity in undiscovered gold and precious metals highlights what are seen as the many opportunities enabled by the 4th industrial revolution enabled by digital technology. Ship scientists and maritime engineers are at the heart of the application of the new developments in technology ensuring that these can be applied safely and in an environmentally sensitive way.
Our staff and students will be on hand to explain and answer any questions you might have.
World Sailing Robot Championship coming to Southampton
 Dr Nick Townsend is the lead academic supporting an enthusiastic team of Doctoral and undergraduate students hostng the World Robot Sailing Chmapionship at the end of August 2018. There are still places for teams to enter so sign up soon!
Dr Nick Townsend is the lead academic supporting an enthusiastic team of Doctoral and undergraduate students hostng the World Robot Sailing Chmapionship at the end of August 2018. There are still places for teams to enter so sign up soon!
Wind tunnel tests on deep water underwater autonomous glider
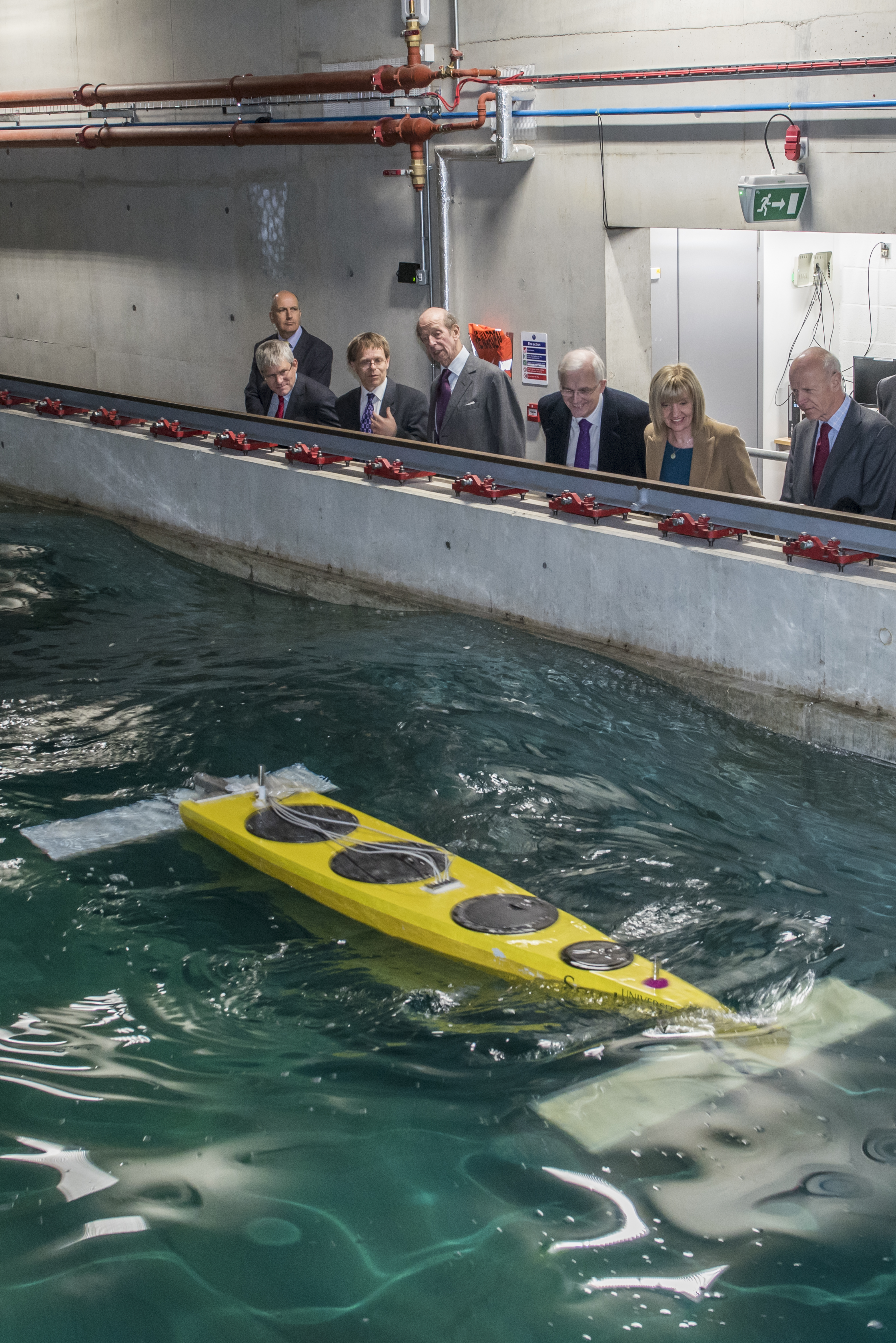
As part of the BRIDGES EUH2020 (http://www.bridges-h2020.eu/). research programme the hydrodynamic performance of the external shape was successfully validaterd in the large R.J.Mitchell wind tunnel at the University of Southampton. The glider is designed to carry out long duration autonomous scientific missions down to depths of 3000m. Current underwater gliders are typically limited in depth (~150 m). This is one of the funded projects underway in the maritime robotics laboratory.

Dr Artur Lidtke , Research Fellow in the Maritime Robotics Lab at the FSI Group, carrie dout the tests over a one week period. Thanks to the size of the facility, hydrodynamic performance of the AUV could be measured at full-scale Reynolds numbers, allowing detailed quantification of drag augments associated with different vehicle configurations. The information will help to validate the design, which has been devised based on fluid dynamic simulations (CFD), allow better estimation of mission endurance, and lead to an improved understanding of performance of such AUVs in the future.
See also: https://twitter.com/BRIDGESh2020/status/956851894449827840
Maritime Robotics in San Diego for Blue Week
Dr Jon Downes attended the Maritime Alliance Bluetech week held in San Diego 6th Nov to 10th Nov as part of the UK Government delegation funded by the Foreign and Commonwealth Office Science and Innovation Network. The UK delegation included a wide range of people from UK Government, Royal Navy, MCA, NOC, UK Universities. British Embassy Washington DC, and members of the British Consulate-General in LA.

The UK Delegation attending the Maritime Alliance Bluetech Week Dinner
The delegation was visiting San Diego to build UK – US links in the Maritime Autonomous Systems sector as San Diego is home to a number of developing companies and universities. A packed week of meetings and visits ensued – visiting Scripps Institute, SPARWAR, and Coleman University Hornets Nest as part of the week. A key part of the weeks activities was the Marine Autonomous Systems UK-US Collaborative Opportunities workshop with approximately 70 attendees and a report on the discussions is expected to be made available during 2018.
The delegation attended the Maritime Alliance demonstration day witnessing some of the autonomous platforms currently under development in the US. These included the WAM-V unmanned surface vessel cooperating with underwater and aerial platforms.

Thanks to the dedication and hardwork organising this event of David Pasquini, Nick Hooper, Natalie Hatour, and Pauline Wood of the British Consulate-General in LA, this was an excellent opportunity to build links both internationally with the USA and also within the UK Delegation itself. Some final hours were used to visit the aircraft carrier USS Midway.

Delphin2 in starring role
Our long serving Autonomous Underwater Vehicle Delphin 2 features in a short 15 minute film highlighting the capabilities of autonomous vehicles to support emergency and disaster relief activities. This was made as part of an EPSRC funded UK Robotics Week Grand Challenge entry.

The première was well attended and a very enjoyable occasion, attracting three classes from the local school whose students were in the film as well as parents and teachers.
The film is now on YouTube for all to see https://youtu.be/eD742AI21fk
If you watch this you will of course see Delphin2, a small surface ASV and our own Dr Jon Downes making his film debut!
OCEANS IV

Between the 19th and 22nd June the FSI group was represented by PhD students Yu Cao and Bernat Font Garcia, as well as postdoctoral researches Francesco Giorgio-Serchi and Artur Lidtke at the Oceans ’17 conference in Aberdeen, Scotland.

The event covered a very wide range of topics, from aquaculture, sensor technologies through to signal classification along with many more applied papers relevant to offshore structures and renewable energy. The papers presented by FSI researchers included a study of a mixed renewable energy scavenging device for an autonomous vehicle (Yu Cao https://pure.soton.ac.uk/admin/files/23591223/161201_132.pdf), development of a turbulence model for application to vortex induced vibration on riser pipes and moorings (Bernat Font Garcia https://www.researchgate.net/publication/316734503_Analysis_of_two-dimensional_and_three-dimensional_wakes_of_long_circular_cylinders), testing of a soft robot utilising shape change to propel itself (Francesco Giorgio-Serchi https://eprints.soton.ac.uk/410902/1/GiorgioSerchi_Weymouth_Oceans2017.pdf), and an experimental study of laminar flow effects on an underwater glider wing (Artur Lidtke https://eprints.soton.ac.uk/411106/).

The conference was also preceded by a day of workshops and tutorials devoted to modelling marine renewable energy devices and design of autonomous underwater vehicles (AUV). Both subjects of significant interest to many within FSI.
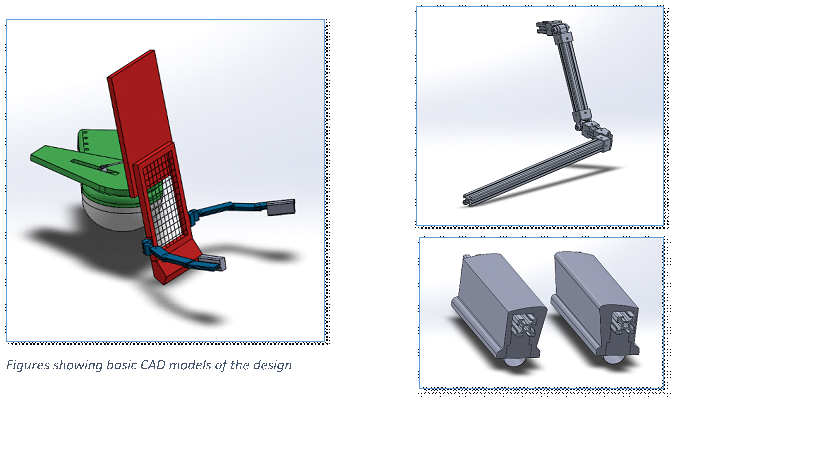
GDP 43 Life saving transformers
The Transformers GDP is a team of eight fourth year engineers: seven of whom are mechanical engineers with one aeronautical student. The project is supervised by Dr Nick Townsend from FSI.
Drowning is a huge worldwide problem, which puts thousands of lives at risk every year:
- 372,000 drowning fatalities per year (WHO, 2016),
- 1,000,000 rescues per year (ILSF, 2016),
- Few victims are ever wearing a lifejacket (CDC, 2016).
A frequent risk for lifesavers is being pulled under the water by a drowning person. Therefore, the project intent is to improve lifesaver safety; the robot will save a person from drowning before the lifesaver begins to rescue them from the water. Passive lifesaving robots exist, such as the EMILY robotic buoy (http://emilyrobot.com/portfolio-gallery/photo-gallery/ ), but none exist to actively save lives.
The project aim will be to; design, build and test a working prototype of a marine lifesaving robot, to actively secure casualties in the water. The team will accomplish this by achieving the following:
- Literature review of drowning casualties, existing lifesaving techniques and technology and the human body form whilst drowning,
- Define the anthropometric maxima and minima for an identified human group at risk of drowning for the robotic device to wrap around,
- Design a robotic mechanism to aid lifeguards in securing drowning casualties,
- Research and develop a sensing and control system to allow the device to work semi-autonomously,
- Build a working prototype of the design,
- Perform a realistic, in-depth testing procedure on the device.
First in class robot sailors
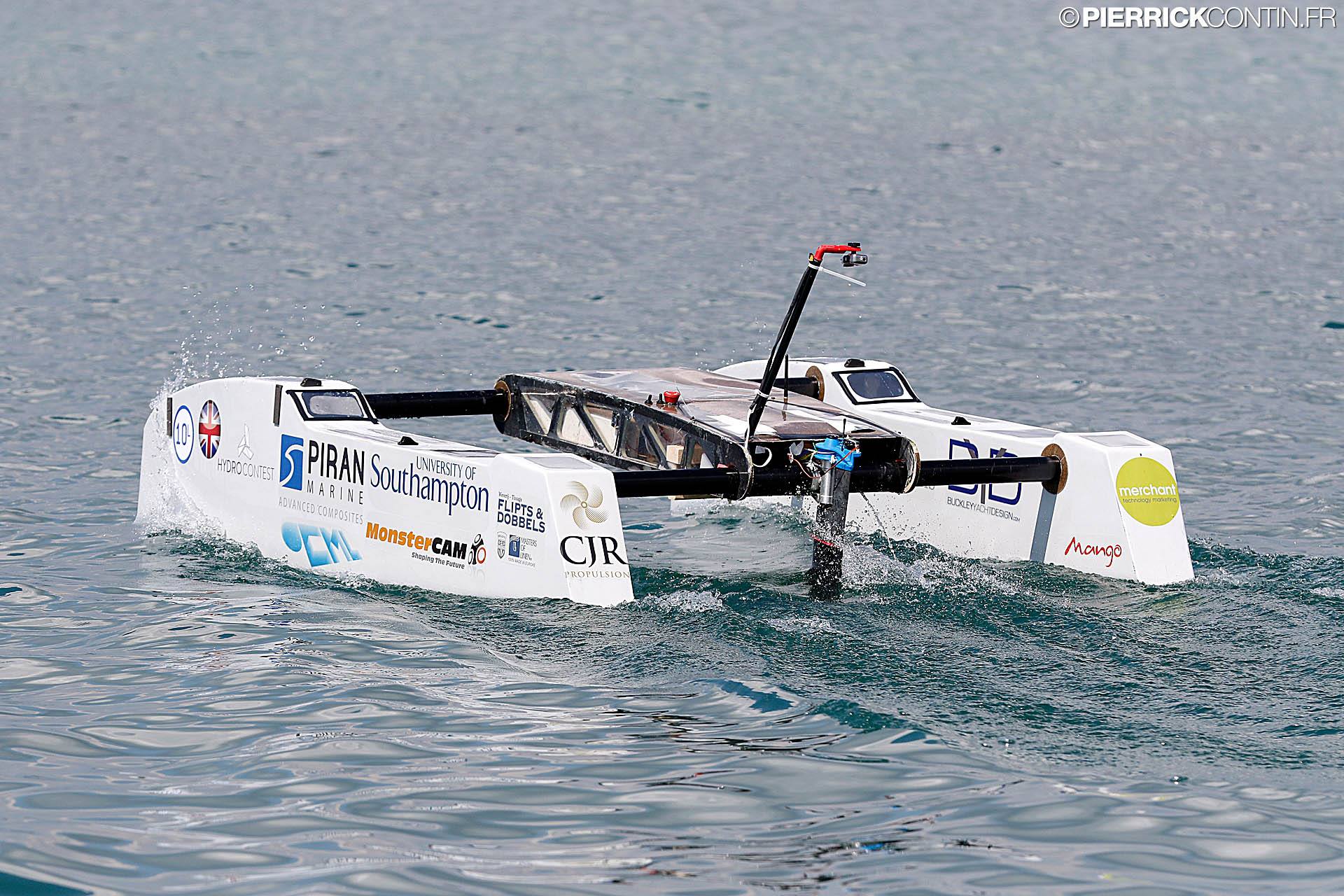
Over the last 9 months we designed, programmed and built a 1m long autonomous sailing robot, to compete in the four challenges of the World Robotic Sailing Championship in Portugal.
Our trip to Viana do Castello was a full success – not only did we learn a lot about sailing robots, but with a second place in both the position keeping and the area scanning and a first place in the obstacle avoidance, our overall position in the micro sailboat class is 1st place!

Many thanks to everyone who supported us, especially by joining our crowd funding campaign: Thanks Alistair Lynn, Tim Miller, Tobias Schnieder, Harry Cutts, Gan Soon Sun, Matt Brown, Fiona Collins, Arnaud Wiertz, Kerrine Lee, Andy Sprot, Bob Preston, Alex Ziang, Lee Yong, Duncan Ross Russel, Alessandro Romano and Simone Provenzano.
We are also very grateful to the University of Southampton, with the funding of the EEF we were able to focus on building our boat, and bring all the spare parts that kept our boat going.
Finally, our thanks go to the organisers of the competition, for making this adventure possible!
A more detailed description of our adventure can be found in our blog, as well as all our software and details of our boat build.
Now with many new ideas we are starting our preparations for the next competition – if you want to join us:
We meet every Thursday 6 pm, new members are welcome to join us from the beginning of the new term! Check our blog, facebook page, or twitter account for the location and dates of our introduction meetings.
Blog: https://sailrobot.wordpress.com/
Facebook: http://www.facebook.com/maritimeroboticssouthampton/
Twitter: https://twitter.com/sotonsailrobot