At the end of September FSI PhD student and Ship Science MEng graduate James Bowker and Dr Nick Townsend presented their research at the OCEANS16 conference in Monterey, California.

The conference which featured over 500 technical presentations and industrial exhibitions was a real show case of latest ideas and innovations in marine technology. There were sessions on autonomous vehicle design, navigation, control, communication, sensors, imaging, and hydrodynamics – every abbreviation you could think off ASV, AUV, UAV, UUV, ROV!

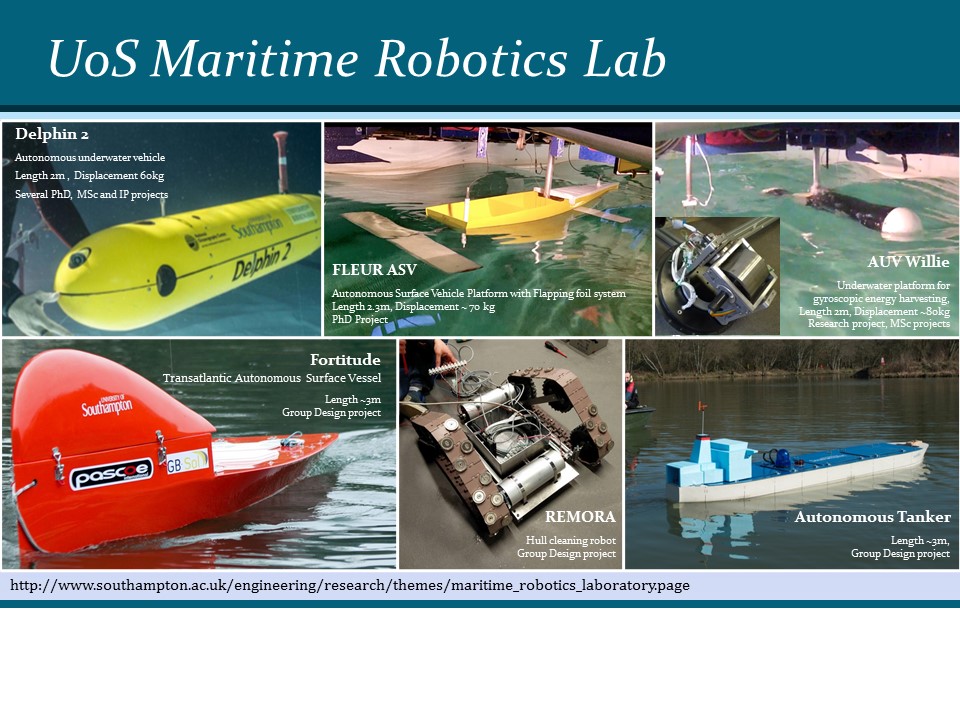
James and Nick presented their research which is exploring and developing new energy scavenging technologies that can augment and power autonomous marine vehicles such as AUVs, ASVs and potentially boats and ships.
James’ paper “Experimental analysis of submerged flapping foils; implications for autonomous surface vehicles (ASVs)” explores the use of submerged or tandem flapping foils as a mechanism to convert ocean wave energy directly into propulsion or to generate power and recharge the platform.
Nick’s paper “In situ results from a new energy scavenging system for an autonomous underwater vehicle” explores capturing the undesired wave induced motions (roll and pitch) of a floating platform through a gyroscopic system.